|
8 D$ _6 y1 G4 y" T 近日,上海海洋大学海洋生物资源与管理学院唐浩教授团队在远洋渔具工程智能化领域取得重要进展。团队成功将人工智能技术应用于拖网网囊水动力性能的精准预测,相关研究成果《A method for predicting the hydrodynamic characteristics of trawl codend based on machine learning models》发表于中科院一区Top期刊、海洋工程领域顶级期刊《Journal of Ocean Engineering and Science》(影响因子IF=11.8)。上海海洋大学为论文第一完成单位,唐浩教授为第一作者。
( ^7 A$ k4 f2 Z. ]+ q1 V1 |, ] 
: s# l. g1 M* B% W; u# D1 \( J) y 图1 论文首页
0 N+ P+ u6 A) V5 o$ J) b 拖网是全球最主要的海洋捕捞方式,其末端的网囊部件直接关系到捕捞效率、尺寸选择性和能源消耗。然而,传统网囊设计长期依赖耗时费力的物理模型试验,难以精准、高效地揭示其在复杂流动中的动态行为,已成为制约绿色、智能渔业装备发展的关键技术瓶颈。 9 ^) \2 x7 \* D# W5 w
为攻克这一难题,研究团队开创性地构建了一套基于机器学习的数据驱动预测框架,设计制作了12种不同设计参数(网目尺寸、网线直径、网线材料、网目类型、结节类型、网囊长度等)的网囊模型进行系统化的物理试验(试验地点:上海海洋大学国家远洋渔业工程技术研究中心动水槽),建立了全面的拖网网囊水动力性能和振荡特性数据库。在此基础上,首次系统性地应用并评估了多种前沿机器学习模型。 1 ~# t* v/ S7 O! l5 R! T# U1 }& W
研究发现,GBGAM与GPR模型算法能够高效映射网囊设计参数与其水动力性能之间复杂的非线性关系,实现对拖网网囊动态行为的可靠、高精度预测。该研究不仅量化了各项关键渔具设计因子的影响,更从机理上揭示了如T90网目能有效提升选择性的内在规律。将该预测模型应用于工程实践,可实现对网囊性能的快速“虚拟筛选”与智能化优化设计。该研究还明确了拖网网囊阻力振荡主要由低频结构动力学主导,为通过运动调控减少非目标渔获提供了理论依据,为开发低能耗、高选择性、生态友好的下一代智能渔具奠定了坚实的科学基础。 9 G$ }8 Y; I) t( C0 E
该研究得到了国家自然科学基金面上项目、上海市自然科学基金面上项目、上海市东方英才计划及国家重点研发计划等项目的支持。
3 n" f0 e( f# M' O 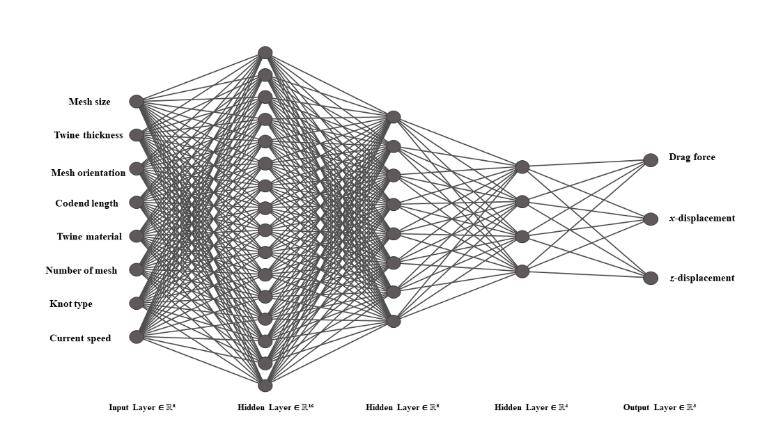
; g) X8 [( Z$ r 图1 MLP模型各层结构示意图 7 \- z3 t. u6 C" N. d- n

$ O) d! c; a; @1 Z, n3 M/ v
图2 基于GBGAM模型对训练集、测试集及全体样本数据集的网囊阻力(a)、最大x方向位移(b)和最大z方向位移(c)的实际值与预测值对比
0 W) w" R. s5 r- G. f 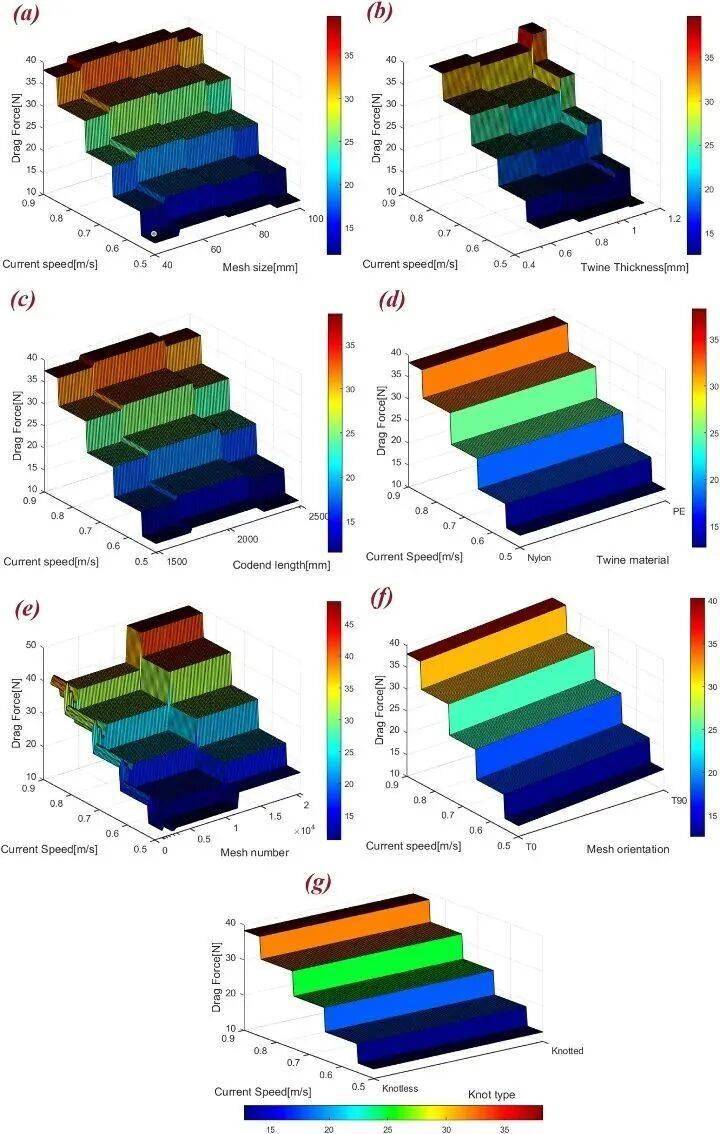
: `8 T0 R! D( q u$ ]
图3基于GBGAM预测模型的拖网网囊阻力预测值随渔具设计参数及流速的变化关系:(a)网目尺寸,(b)网线直径,(c)网囊长度,(d)网线材料,(e)网目数量,(f)网目类型,(g)结节类型。
( V- F6 k9 N$ ~1 o# C: { 近年来,以唐浩教授和NYATCHOUBA NSANGUE BRUNO THIERRY(吉利)博士为核心的科研团队,在海洋工程、流体力学与渔业领域持续产出高水平成果,已在《Marine Structures》、《Journal of Fluids and Structures》、《Ocean Engineering》、《Aquacultural Engineering》等多个国际权威期刊发表系列论文,研究内容涵盖南极磷虾拖网、刺网、围网等多种渔具的水动力特性、流固耦合分析及智能优化设计,展现了团队在渔具水动力领域的良好积累与国际影响力。返回搜狐,查看更多 : X k; }* Q& ?/ ]' U3 m: n, p: ?
" K. f" i* f5 f/ W5 H4 Y
( U* O- U# r, ?, z9 u: y
1 p; E' {3 W' G) t
U. Y! k/ P$ }% O4 X | 





