|
$ p2 I/ {& l. O: i

0 j9 l1 u* ^' O7 u! P: m; x

3 ~* E4 _, Q8 } {( J& T3 T% _ 摘 要:在深水油田海底采油树的安装过程中,ROV 通过目视检测、开/关井口盖、跟踪/监视采油树、协助采油树与井口或采油树回收工具与采油树对接、调整采油树方位、锁紧/解锁、压力测试等几个步骤,安全快速的完成深海海底采油树的安装。对于安装过程中的缠绕和误操作风险给出了解决方法。 W v, a5 _$ o5 M4 Q& i; A
随着海上石油开发的逐步深入,海上油气田的开发、建设已经从浅水区扩展到了 3000m 的深水区。潜水员由于受到作业水深的限制,在深水水下安装作业中难以发挥作用,而水下遥控机器人(ROV)以其作业水深大、安全、高效等特点在海洋石油开发领域得到广泛应用,并发展迅猛,ROV 已经成为深海油气田开发不可或缺的工具。深海油气田的开发模式一般采用水下生产系统(Subsea Production System)外加浮式生产储油设施(FPSO)进行开发。而水下采油树是油田水下生产系统的核心装备。由于海底环境比较复杂,如何安全快速的完成采油树的安装是需要解决的问题,本文基于南海深水油田开发的工程实践,简要给出了 ROV 协助采油树安装的方法和步骤。 , v! A% K8 t$ N" f6 Z1 F
1 ROV及采油树简介
9 h P8 a5 r& O# Y3 s ROV 系统可简单分成 ROV 控制系统、收放系统、ROV 潜器三部分。依照 IMCA(国际海事承包商协会)标准,ROV按其作业能力可分成观察级、准工作级、工作级、拖曳型及其它特种用途 ROV 等五个级别。在水下采油树安装、维护过程中,通常使用的是工作级 ROV。该类型 ROV 功率较大、负载能力较强,可根据作业需要搭载各类专用水下设备和工具。常规的 ROV 系统见下图 1. - F* n! Z1 N( Q h' }

1 h$ N+ k% h% |
水下遥控机器人与潜水员相比,在深水作业方面作业时间不受限制;在水面控制单元遥控操作,作业环境安全;作业深度可达 3000m 以上;水下作业功率大,可以完成潜水员无法完成的工作;水下作业范围大;支持设备少,操作维护较饱和潜水简便。
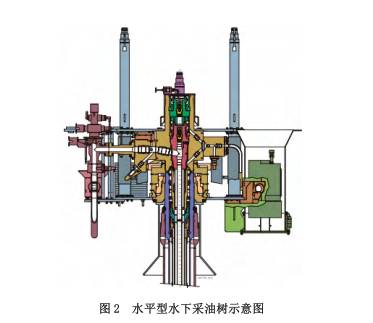
) Z; l6 _4 b0 X 水下采油树是一种用于控制和调节油井生产,并为钢丝,电缆,连续油管等修井作业提供条件的一种装置。水下采油树按照其结构形式可分为两类:垂直型和水平型。在深水海域使用的都是水平型水下采油树,见下图 2。该类型采油树的结构设计对于 ROV 作业来说较为友好,方便 ROV 通过机械手或者扭力工具实现对采油树的阀门的控制。 + v5 n7 k& S7 w& M# ~& A
1 B) T' e/ Q5 J1 ?. o
2 ROV安装采油树方法
+ I6 f$ J, v$ p 在采油树的安装过程中,ROV 工作流程可以分为目视检测、开/关井口盖、跟踪/监视采油树、协助采油树与井口或采油树回收工具与采油树对接、调整采油树方位、锁紧/解锁、压力测试等几个步骤。对工作过程中可能存在的风险进行了辨识,并给出了解决方法。 # l8 t3 u7 P0 h) f/ u% T! c
2.1 目视检测
! v- G+ K, y x& c' P ROV 按照要求对水下采油树或井口结构进行目视检测,以确定目标对象及其附近海底没有障碍物,若有可能影响到采油树回收或安装的障碍物,则使用 ROV 机械手或者船舶吊机将障碍物清除;在所有安装项目结束后,ROV 也将对采油树做一个全面的目视检查并录像,以确认采油树状态良好,并且保证附近海底没有杂物遗留。
% d8 q4 q$ d/ h" ]8 M2 D2 d 2.2 开/关井口盖
! ~2 O9 H& e. s 采油树安装前,ROV 使用机械手将井口盖取下,放置在井口基盘附近;采油树安装完成后,ROV 再将井口盖移至采油树井口处。
! b" T* j: n- W; p, q 2.3 跟踪/监视采油树或吊钩
7 q: |! S$ i: U7 t: B. [ 采油树在水下起升、下放和安装过程中,为保障采油树的安全,ROV 需要借助于摄像头或声纳全程对目标物进行跟踪、观察。
9 r2 y3 a: z; Y6 w& U 2.4 协助采油树与井口对接
0 C u0 P" f8 V* |6 y. \3 [2 t TRT 与采油树对接、采油树与井口对接过程中,吊机的吊臂位置保持不变,一般通过调整船位和收放吊机钢丝实现二者的对接。对接作业时借助 ROV 从不同角度观察二者之间的相对位置,船舶操纵人员依据 ROV 操作人员提供的位置参数对调整船位,直至二者顺利对接。为减少对接时间、提高工作效率、降低碰撞风险,通常使用两台 ROV 同时作业。 , p6 h3 p; [( {- R
2.5 调整采油树方位 ! Z) G; D2 S1 A
采油树与井口对接之后,在其固定前需要按照设计要求调整采油树的方向,以方便安装采油树与其他海底结构物之间的连接管汇。ROV 上搭载有一个专用的液压驱动装置,可
: j2 @8 S9 o2 b" l( q9 f y& m% _ 以使 ROV 与采油树实现刚性对接,ROV 和采油树对接好之后使用 ROV 推动采油树在井口上转动至要求的方向。在作业过程中另外一台 ROV 在附近观察 ROV 与采油树的位置变化情况。 3 X4 ^; e( |! L2 J4 _) p2 d
2.6 锁紧/解锁 ) r7 H) e; D: M: k" \/ h0 M
采油树调整到位之后,ROV 使用增压泵和注液器往采油树和采油树回收系统的锁紧装置内注入液体,控制采油树锁紧装置,将采油树和采油树回收系统锁紧或解锁。 . V+ a/ \% v( C- ^( a
2.7 压力测试
4 V, ~" J1 k9 K) A 采油树安装完成后,需对采油树内部管汇进行压力测试。ROV 使用增压泵和注液器往采油树内加压,测试压力通常为 5000psi。测试过程中,ROV 观察压力表监视压力变化情况,若规定时间内压力没有出现明显下降即表示压力测试成功,采油树安装也基本完成。
& r! x( k: Z: s" T 2.8 风险辨识 ! W: x( n6 Y! Y0 ` v$ k2 b
ROV 在采油树安装支持作业时,存在着多种风险,如何认识和规避这些风险尤为重要,不仅可以降低 ROV 设备损坏率,还可以直接提高采油树安装工作的作业效率。 2 O* d8 l/ {' e( G! @& s
2.8.1 缠绕 / s T* a- ^- X: h- C$ ^; I
采油树安装作业时,为提高工作效率、缩短海上作业时间,有时会使用两台 ROV 同时下水作业,大大提高了 ROV脐带缆之间缠绕的风险。 / t# O5 Y4 B' g }: V; F3 Z& ^
为降低脐带缆缠绕的风险,ROV 操作人员不仅要清楚自己所控制 ROV 和 TMS 的位置,还要清楚另外一台 ROV 和 TMS的位置。此外,保持两个 ROV 作业小组之间通讯畅通、及时也可以有效减少缠绕风险。
* X1 r6 b7 {# ], j9 @ 2.8.2 误操作
% f& F7 h; h# c* h# |0 h w 水下采油树结构较为复杂,ROV 作业人员可能由于对采油树结构不熟而导致误开关或开错阀门等错误操作,可能引发重大事故。
& R/ j' X7 V6 _; f 作业前加强 ROV 作业人员作业前的培训工作,使之了解采油树的基本结构和特点及施工流程;作业过程中,听从现场采油树工程师的指挥,严格按指令操作可以规避误操作。 * a& V8 T+ C4 s { S9 J
3 总结 ! ~" i5 G% C# ]
随着深海油气田开采业务的逐步深入和 ROV 技术的发展,ROV 在深水油气田开发和后期维护管理中的应用也愈加广泛。本文所提出的 ROV 使用方法也可以为其他水下结构物的安装提供参考。(作者: 中海油田服务股份有限公司 汪雷 | 海洋油气网整理发布)
! k. I& l# w7 q, _; [; o  关于水下生产系统报告( 关于水下生产系统报告(
# |2 e: }9 O4 G- N+ j# _2 _
向上滑动阅览) 8 i# |4 n4 L: ~9 p/ Q3 n
自5月底我们对外发布拟编制《2017海上油气田水下生产系统关键设备和技术报告》的消息以来,陆续收到多方的咨询和反馈。如今,这份历时四个月、由美国的咨询团队以及多位特邀行业专家精心打造的国内唯一的关于水下生产系统专业报告即将问世。目前该报告的内容编制已经完成,将在国庆节后一周内正式出版发行。已预订的朋友我们将在出版后的第一时间安排邮寄,还有想预定的朋友请点击以下链接获取预定方式: / z$ J5 Z+ r6 o- z% ?
限量发售 | 这份报告凭什么称为行业内第一手材料?
7 I9 }& z% I2 [4 S! [ t0 N 该款报告有近五万字,不仅详细阐述了水下生产系统关键设备和技术的相关知识,就现阶段全球主要水下项目进行介绍,更针对不同地区的水下生产设备市场未来的发展趋势进行了分析。真诚希望这份报告能满足大家的期待! " {' A1 G% |6 B3 [

3 y* S+ B% y* {
2 u; @4 j: h( J% I9 P) [$ r6 s: ^$ E! Q
- n8 q' I( T! \' \, s2 Q' u
* e: F+ d0 j6 o! S P
6 a# \$ x( t: l2 ^. U, n | 

