|
5 s# i+ b" u. A! }) u
原标题:激光雷达探测海洋浮游植物薄层的研究成果
8 n( r' S. O. E% d1 A7 C0 B6 q: n 1 研究成果概述
- ?( o5 \5 o9 `& n& }) {& [1 _ 近日,浙江大学本科生科研训练项目(SRTP)“浮游植物层次构建与其海洋学意义研究”课题成员——光电科学与工程学院2019级本科生杨一辰、潘杭凯和郑德康,利用激光雷达在探测海洋浮游植物薄层方面的高效性,分析了浮游植物薄层的特征和形成机理。该成果有助于海洋激光雷达技术的应用研究,并加深对海洋浮游植物薄层的认识与理解。
: F( q# ?8 P& _+ N7 o2 k 研究成果以”Characteristics and Formation Conditions of Thin Phytoplankton Layers in the Northern Gulf of Mexico Revealed by Airborne Lidar”为题于2022年8月25日发表于《Remote Sensing》 (IF=5.3)杂志。
; S* u$ t Q0 P7 ]/ H 2 背景介绍
2 W) ]$ J! s0 D 浮游植物薄层是海洋次表层水体中的一种特殊的浮游植物群体,在几厘米到几米的垂直厚度范围内具有很高的光合微生物浓度,并可在水平方向延伸数十公里。浮游植物薄层与碳固定、有机物转移和有害藻华等生物化学过程密切相关,因此,高效地探测浮游植物薄层并研究其特征和形成机理对海洋生态系统和生物地球化学的研究非常重要。然而,传统原位探测方法因为需要在水中探测,存在探测效率低、空间分辨率不足等缺点。激光雷达是一种主动光学遥感手段,具有高效的海洋剖面探测能力,广泛应用于鱼类、浮游生物、叶绿素浓度等诸多要素的探测。近期研究表明,海洋激光雷达在浮游植物薄层探测方面具有显著优势,但缺乏基于激光雷达的浮游植物层特征和形成机理研究。
" B/ V8 t# W7 L) P0 x t/ I. u$ f 3 文章亮点
$ ?0 L F0 Z6 }0 H; b( a" x+ s5 E 浙江大学光电科学与工程学院研究团队采用机载激光雷达,高效探测了海水光学特性垂直分布信息,获取了大范围的浮游植物薄层。激光雷达主要由激光器、接收系统和信号处理部分组成,其结构如图1所示。本研究中使用调Q、二倍频的Nd: YAG激光器,发射12ns脉宽、532nm波长的偏振绿光进入海水,并由望远系统收集后向散射回波信号,回波信号经过模数转换后被计算机保存下来。
8 K! w! Q( r* {. B 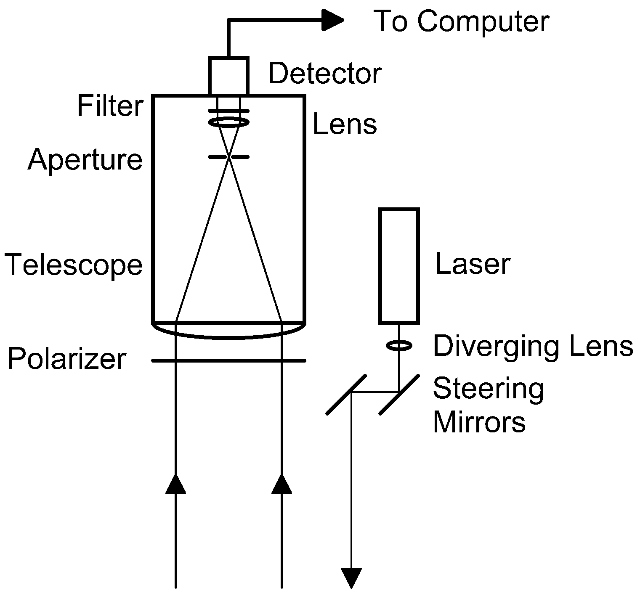
7 `" X( t& b5 ^. w' b1 ^8 u
图1 激光雷达结构示意图 ~3 Y& g g7 J! ^4 j
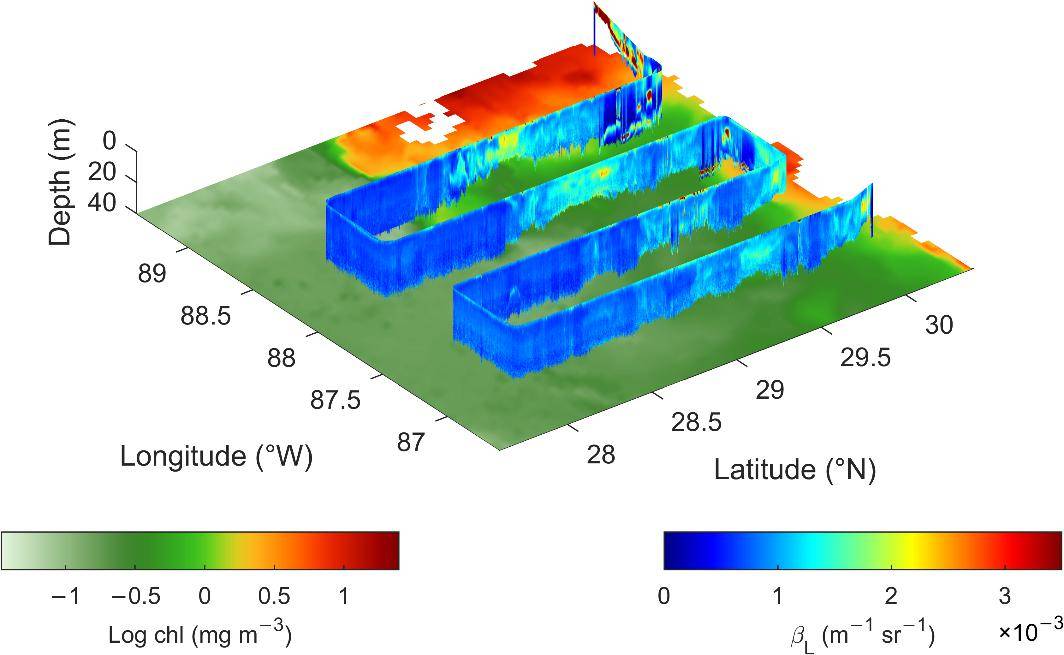
对激光雷达脉冲数据进行反演得到后向散射系数剖面图,从中可直观地识别出浮游植物薄层,并得到相应的薄层深度与厚度特征。该算法能有效地提取出薄层特征,在不同水深条件下均有较好的反演结果。激光雷达数据反演结果如图2所示。 + ?. D2 @% A& @* H# g; R
. ^/ B: k5 F9 s" c$ c. y" z# _, A
图2 后向散射系数三维分布图 - d! L. j; j+ L1 l; `' ~! F, L
根据反演得到的薄层信息,在海水深度和叶绿素浓度图上绘制的薄层分布图(图3),薄层主要分布在水深小于1000m的浅水区,在深水区仅有零星的薄层出现,且海表叶绿素浓度为2mg m-3左右的位置处出现概率最高。探测到的薄层深度集中分布在5-15m,厚度在1-5m之间。
1 h( Q t* \0 o4 {4 X( {7 } 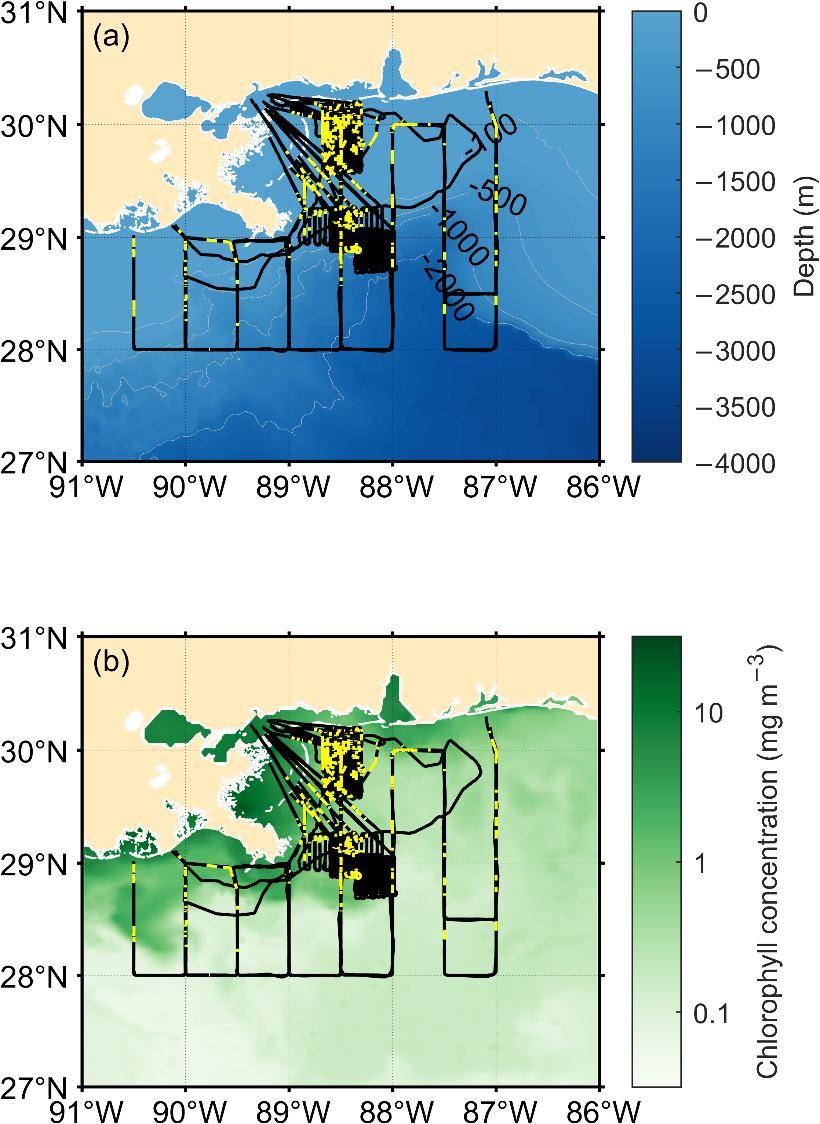
- {- I9 Z: ?- N7 ~6 N: a. B5 J
图3 薄层分布图
' J+ d5 P& h8 N" }% C 文中结合海洋混合层深度、叶绿素浓度、海水深度等,分析了薄层特征与环境因素的相关性,并得到了较高的相关性(如图4)。并从原位生长、涡旋等机制出发,对探测区域内的薄层的形成进行了解释。光照在海水表面丰富,而营养物质一般沉积在深水中,并受到洋流等因素的影响,当两者在一定深度范围内同时满足浮游植物的生长时,就可能形成薄层。
1 T; X* d$ z8 l* K- f# g% b 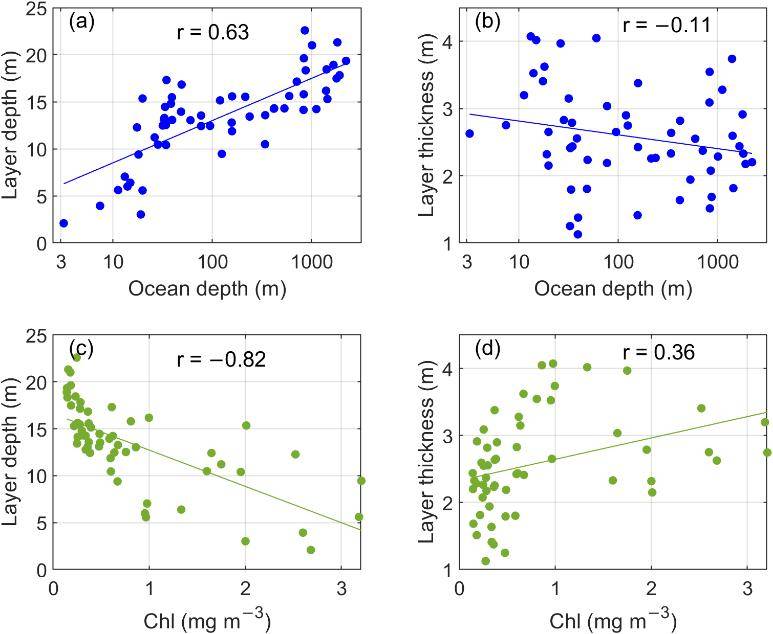
9 j) s+ y( ~3 T$ J! I
图4 薄层特征与叶绿素浓度、水深的相关性
0 E: e" p5 ]: a" |- _/ U0 @ 4 总结与展望 4 w# [( K. h- Y4 O8 p: P
该研究展示了激光雷达在海洋浮游植物层探测方面的高性能,分析了浮游植物薄层的特征和形成机制。浮游植物薄层的形成是与生物学、流体物理、海洋学等学科知识密切相关的复杂过程,今后将结合考虑更多因素,期望在更大的时空尺度上建立三维浮游植物薄层模型。本研究中使用的激光雷达基于弹性后向散射,需要假设激光雷达衰减为常数,这会造成不可避免的误差。未来,有望使用机载的高光谱分辨率激光雷达来解决这一难题。
, [. S- ]* }' n8 \ 5 论文/作者信息
2 l2 f& T( n& |* c 论文第一作者为浙江大学光电科学与工程学院本科生杨一辰,通讯作者为浙江大学光电科学与工程学院兼聘助理研究员、宁波研究院周雨迪博士,合作者包括浙江大学光电科学与工程学院刘东教授。该工作得到了科技部重点研发计划、浙江省自然科学基金、中央高校基本科研业务费专项资金、浙江大学宁波校区人才引进基金、本科生科研训练计划项目等支持。
1 ]# B+ [ q, \4 | 论文链接:https://www.mdpi.com/2072-4292/14/17/4179 , c! z7 j2 }& \' j& M- F: `
声明: 本文资料和图片来自于政府/园区管委会官网、官方公众号、材料相关媒体及其他公开资料,如信息有误或有遗漏,欢迎联系我们修改;我们尊重知识产权,因整理资料所需,本文中引用部分公开第三方的数据、图片等内容,其所属的知识产权归属原作者,且凡引用的内容均在文中标注了原文出处、原作者。若版权所有者认为本文涉嫌侵权或其他问题,请联系我方及时处理;我们力求数据严谨准确,但因受时间及人力限制,文中内容难免有所纰漏。如有重大失误失实,敬请读者不吝赐教批评指正。 返回搜狐,查看更多
% z2 |5 [% f( m$ j: O
m+ }+ \# O) `! ^% F+ m" W 责任编辑:
2 u) S, D8 i" B4 v! N. ?$ ~
2 D. j c( ]3 e8 m4 L
1 S- E$ z+ f6 ~; s
9 H! l! t, S5 I$ [( R+ c" \+ o. D$ |" ^; L! L' @1 x1 J1 w% w
| 





