1.POM模式概况 前文用了两篇文章的篇幅讲述了如何从0到1实现一个浅水方程,涉及到了交错网格、差分离散化和初边值条件的处理等等。本文就来探讨一下海洋模式中最经典的模式之一,POM模式。
& i1 b1 ?1 }6 V8 p) ?: R* j, g POM模式的全名为Princeton Ocean Model,在1970年代由G.Mello和Alan Blumberg所开发。经过发展和维护,逐渐成为了可以胜任数值实验和业务化应用的经典模式。尽管从2021年的今天来看,这个模式可能略微跟不上时代,但其经典型和代表性是模式学习者所绕不开的。后续很多海洋模式都是从POM中修改而得到的。POM是一个串行模式,所有代码都写在一个Fortran文件之中。不涉及多文件编译,而且代码结构清晰,是模式学习者初学的首选。除此之外,对于模式的高性能计算的学习者来说,优化POM模式也是很好的实战案例。倘若能用MPI把POM模式改写成并行代码,对代码能力的锻炼是很显著的。
# B' G4 V5 ]" `! K POM模式的原始控制方程如下。* p& q3 L7 w- G7 B
/ f$ i ?6 n. V5 h7 }8 R2 l* K% G
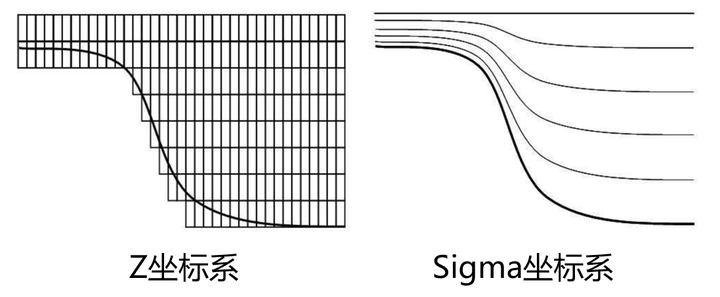
/ p. Q2 V) E, w4 E. M. K. B2.Sigma坐标系 前文讲述的浅水模式,介绍了蛙跳格式和交错网格。由于浅水方程组对NS方程做了垂向平均,因此前面提到的网格都是水平网格。在真实的海洋模拟中,水平尺度大于垂直尺度。海底地形起伏较大,所模拟的海区水深可能从几十米到几千米深。如果使用传统的笛卡尔正交坐标系,会出现垂直步长dz不论怎么取都不能满足所有需求。假如近岸水深50m,远洋水深10000m,如果dz取5m,近岸则有10层的网格,而远洋则会出现2000层的网格,造成了极大的计算资源浪费。而如果dz取的比较大,在浅海地区的层数就少的可怜。除此之外,笛卡尔正交坐标系划出的锯齿状很难贴合边界,由下图可以看出,Z坐标系中被底地形横切的网格,不论当做海洋还是当做底地形都会影响精度。* R2 J* G' s: n9 [/ Q
POM模式给出的解决方案是采用sigma坐标系,该坐标系也被称为地形追随坐标系。有图中可以看出,该坐标系能把海洋各个位置均等的划分同样的层数,在边界上也能很好的贴合地形。因此,在推导POM的方程时,要做的第一步就是将上述控制方程一一进行sigma变换,得到在sigma坐标下的控制方程。
3 k: y/ [! ?5 U# p
- o0 ?# |3 H' C0 V. g3 w+ Y" _
. S; w: G" f# D% d. C$ p0 m 根据链式法则,就可以得到每个导数项的关系。
* x9 S% J" `& m7 g' |7 }* @0 }4 J: X- O
0 ?; x0 b. o) j. m
用s代表x,y,t的任一项,D海底到自由表面的高度,即 + U/ \3 d- W5 [) }9 _/ D% C. D1 O
,可得到如下表达式。 3 I# B! ?+ q9 W$ g4 [- t% W
# }0 d. H/ X4 a# \+ s u4 {4 E" A: e: x/ D7 Z
由此推导下去即可得到sigma坐标下的控制方程,推导过程极其繁琐,再此省略了推导的中间过程,直接给出结果。为表示方便,后文sigma坐标系的变量中省略其右上角的星号。若对推导的详细过程感兴趣,见文末参考资料。* j& [" _2 _" M
7 L' y T% {1 ? [
# {: E+ o1 |6 m$ T% d3.内外模态分离 首先,再回顾一下第一篇文章所讨论过的CFL条件,上次是从数学的角度理解CFL条件为什么能确保线性偏微分方程稳定,这次从波动的角度理解一下CFL条件的意义。由于海洋和大气的动力框架系统为高度非线性系统,因此其稳定性变得更加难以控制。CFL条件是一种很好的参考,而无法绝对确保稳定。 C9 S" L& {' h) }6 n$ a
9 k9 C5 r* Z0 h0 _- _! f$ p7 @3 m! y8 K; R
1 |; P' `3 V% E$ ^6 d3 i CFL条件中c的物理意义是波速。假设 ,那么此时 。可以看出网格的步长比和波的传播速度相同,意味着这样的网格分辨率是无法分辨这个波的。而当0 d' y- p7 j% n, ~5 m! a# k
时,波速比步长比要大,同样是无法解得这个波的运动状态。这样描述或许不够严谨,但是有助于理解CFL条件的物理意义。结合海洋的实际情况来看,在表层的表面重力波的波速约为200-300m/s,而在海洋内部的重力内波波速远小于表面重力波,大概是在5m/s左右。可以看出,海洋内部的运动过程和海洋表层的运动过程时间尺度相差较大,表层明显快于内部。再回看CFL条件,可以看出如果要想同时满足海洋表层和海洋内部的稳定,表层就需要迁就内部。而POM模式的做法是将表层和内部分离。把表层的正压过程和内部的斜压过程分别称为外模态和内模态,分别设置时间步长。 " l$ l3 t6 |( G* m
先来看外模态(即正压模态),该部分也被称为快过程,时间步长较小。处理方式类似于浅水方程的推导,对其所在区域做垂向积分,忽略了水平扩散项。在sigma坐标系下的方程组如下所示。8 t0 D, [' N$ g- w# P, ? K
) i, ^8 p4 ]+ J' [% f5 x
: } T9 `( v/ F" v/ U9 k1 h
对于内模态,则方程形式和第二部分列的形式一样。由于外模态时间步长短,内模态时间步长较长。在POM模式中,内模态的时间步长通常是外模态的数十倍。如果将POM模式的整体结构写成伪代码的话,可以写成如下形式。内模态的时间步长是外模态的isplit倍,这样外模态就可以嵌套在内模态的循环里写。* M q4 H/ `* a% U6 K2 z
program POM+ c" m. s* \; \$ {8 i) c
Init Paramter !初始化各种参数,如im,jm等 Init Variable !初始化T,S,U,V,W等 do iint=1,iend !内模态循环 call advct() !计算平流项 call baropg() !计算压强梯度力 do iext=1,isplit !外模态循环 compute el !计算eta compute ua !计算正压ua compute va !计算正压va compute ut,vt!计算正压平均速度 end do !外模态循环结束 adjust u,v ! call vertvl !计算垂直速度 call advq !计算km,kh call profq
& e9 P0 V- ^; p) _+ g1 z% l call advt !计算T和S call proft
! z& @ y" q' b2 | call dens !计算密度 call advu !计算u call profu9 E$ m, [; W, x$ j6 b
call advv !计算v call profv
+ |: M" x+ X9 y print !将结果输出 end do !内模态结束end4.湍流闭合方案0 X S% h, o Z) J8 v
: p: q- x3 v. K3 ]0 p, h0 _6 `
通过观察可以发现,本文最开端给出的POM原始方程的运动方程和温盐方程都有 或 。而在这些方程的末尾,也有 , , 或 这些项。这些项的存在使得方程的未知量多于待求解的变量,而如果忽略这些项则会对模拟结果大打折扣。因此,需要解决这些参数的设置问题,而POM模式选择了使用Mellor-Yamada方案,具体形式如下。& g9 m4 y+ e' d4 W8 q" t
* g0 q* z- D8 z8 T
6 I" m# l' y8 B- |
) l% C t0 C8 {$ O* O$ w0 O3 f! g) j 湍流是一个十分复杂的现象,如果想理解湍流参数化方案,就需要理解什么是湍流。下文将从湍流的本质讲起,逐渐引出湍流参数化方案的全貌。当对模式的动力框架有了比较明确的理解之后,再去看模式代码甚至修改模式代码,就会容易很多。
6 e% \! Y4 L* }版权声明 本文创作的初衷是用于帮助数值模式的学习者。欢迎转载,转载请私信并注明作者和出处,请勿用于任何商业用途。( R; ~5 B n, m5 x' Q; j9 s8 U
参考资料A Manual for POM and GOMO. Xiaomeng Huang, Xing Huang. Users Guide For A Three-Dimensional Numerical Ocean Model. George L. Mellor. CEE262c Lecture 8: Sigma coordinates and mode splitting: The Princeton Ocean Model (POM).
& |9 N# R& L, s& f
. W9 t7 q- D8 h |


 ; s8 N, z, h# {, _
; s8 N, z, h# {, _