|
. a3 I3 O9 r8 o" k
0 Y( n5 P' z# \& }2 m% r+ f1 _9 k) I! _ ▍来源:《导航定位学报》2018第2期 ! W7 ^* F% m# S: n; ]: {7 Z9 P$ U7 N
▍作者:董 江,交通运输部天津海事测绘中心 7 R6 p0 j2 f# }; g' |. F5 d
摘要:针对海洋测绘中对GNSS 差分定位的真实精度不确定而难以选择其方法的问题,以RTK 常规差分、我国沿海的Beacon3 z3 `9 a: I. k& v5 b/ X( t& s( d+ T' g
信标差分、覆盖亚洲的日本MSAS 星站差分和中国精度ChinaCM
5 f& p/ B$ l, S9 h$ i* A 星站差分为研究对象,对这几种差分定位方法的精度进行了验证和比较分析,实验结果可以为海洋测绘提供参考。 7 f/ `3 g: b6 z9 K6 P
关键词:海洋测绘;GNSS;信标差分;星站差分;定位精度
$ u3 |' A+ _; ?/ A 0 引言 5 T; R5 Y3 l# G w+ ]$ l
在海洋测绘中,当前确定测船的水平位置主要依靠全球导航卫星系统(global navigation satellite system, GNSS
: ?% P( I+ _* p+ e4 Y+ u) R )的差分定位方法, 可用的GNSS 包括美国的全球定位系统(global positioning) y- R6 M# u, Z$ l
system,GPS)、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite# Z8 F3 z6 X8 K/ h
system,GLONASS)、欧洲的伽利略卫星导航系统(Galileo navigation satellite, c, V" ?* A% o; A3 h
system,Galileo)和中国的北斗卫星导航系统(BeiDou navigation satellite
+ A$ A, B6 [+ D" g system,BDS)。备选的差分定位方法包括实时动态(real-time' U: X) W: s# E7 l# }7 X- p7 _3 K
kinematic,RTK)差分、信标差分和星站差分等。在海上作业时,测船在大多数情况下无法接收到陆域差分用的连续运行参考站(continuously
3 I4 @! `" w% w" W: i% ]9 G) D0 j operating reference stations,CORS)信号,故本文不讨论CORS 定位的相关问题。 ( ]; t* y3 N6 J1 {) U
各种差分定位方式的作用距离和定位精度各异。文献[1-2 ] 研究了GNSS-RTK 星座组合进行常规差分定位的精度, 文献[3 ]
; F: w/ s" L; _- [2 w 研究了RTK在高层建筑动态变形监测方面的应用, 文献[4 ]介绍了中国沿海信标(Beacon)差分定位系统, 文献[5-6 ] 对星站差分技术做了相应介绍,
) d9 P5 K& a% v. R& G# d: V1 P 文献[7 ] 研究了星站差分技术在海岛礁控制测量上的可行性,文献[8 ] 研究了BDS
, s( P' b4 o) m9 e 广域差分性能的评估技术。目前大部分学者只是针对同一种差分定位技术或同一种系统的差分进行研究, 探讨其精度和应用。然而对于用户来说,
. F/ l9 y& {0 [7 R' U; B) V8 q* q 如何选择一种即满足精度要求又能兼顾作用距离、效率、费用等因素的差分定位方式是很重要的。本文通过实测的方法,对这些差分定位技术在海洋测绘中的精度进行验证和比较分析, 从而得出一些有益的结论,为业内同仁提供参考依据。
) x3 P, o$ J7 x& `" O 1 GNSS 差分定位方法 & J! Y9 f0 R% q4 g* F, a
GNSS( @' T! `+ O& Q0 X Y9 x
系统的工作原理是根据多颗卫星的位置信息和到达地面点的距离值解算地面点的具体位置。在解算过程中由于受到卫星轨道误差、卫星时钟误差、电离层时间延迟误差、对流层误差、信号多路径效应、地球固体潮、用户接收机时钟误差、接收机跳变等因素的影响,4 [% O# [2 |; M# n9 Q* n7 g
实测距离并非卫星到用户的真实距离。差分技术就是通过地面点已知位置(基站)和接收机观测数据解算出上述误差的改正信息,
h" E% s' S& M7 ?! F% z0 `5 T# a2 h 或利用地球静止轨道卫星和全球分布的位置已知的参考站,通过对GNSS 定位测量的误差源进行区分和模型化, 计算出每一种误差的改正值,
' F* n3 {* K5 S% m* O2 q7 j& V 再将这些改正信息实时发送给用户, 用户接收机将测量结果进行改正就能得到精确位置。根据目前国内海洋测绘差分定位系统的使用现状, 可以将这些差分定位技术分为两大类:! B5 ^8 s b! _" q
地基增强局域差分系统和星基增强广域差分系统。 % w: _/ g, P/ n, K5 v
1.1 地基增强局域差分系统
# Q" F! Z# r- ?* T. ]. t4 x RTK 差分是同时采用2 台GNSS 接收机工作,1 台安置在地面已知坐标的基准点上,通过该点测得的坐标与已知坐标比较,
4 g$ O) ^1 V' Q8 I# ] 得到测区一定范围内的公共误差值,然后将公共误差值通过电台实时传输到另1 台接收机,该台接收机将所在测点测得的坐标进行误差改正, 获得该点精确的坐标值。RTK* I9 j/ b2 C) @6 t* x ~
常规差分定位的优点是定位精度高,通常为厘米级;但缺点也很明显, 例如计算整周模糊度需要的数据量很大,计算时间长,需要架设基站,作用范围小(一般1 0 km* R. {" ]2 r; w! a: f
以内)等[1-3]。 4 y9 u) n8 A. A7 s, x6 H4 |
交通运输部于1 9 9 5 —2000 年在我国沿海地区建造了20 座信标台站,并于2002 年全面开通,它是通过基于区域信标基站的差分,
- a6 C( }$ u/ V: z9 ^ ~ 正式为公众用户提供免费的海上高精度导航定位服务, 通常称为Beacon 信标差分。信标台站相当于RTK 差分定位的基准站,这些信标台站24 h* U$ b$ Y* H/ P" \! }
发送航海无线电技术委员会(radio technical commission for maritime services,RTCM)差分校正信息,
5 F' U( }6 K5 i0 c 其作用距离陆地为1 00 km,海上约300 km,用户端只需要1 台GNSS 接收机就可以实现高精度的实时定位。有研究表明,随着BDS
7 Z# p; g. x7 X: l) D% O2 D 的建设和完善,目前通过BDS 伪距差分和BDS/GPS 联合伪距差分算法,信标差分的平面定位精度优于1.5 m[4,9-10]。
. p% X3 X1 S) }3 o1 S& x 1.2 星基增强广域差分系统
: [3 b5 v- V6 D# f5 L" L$ F 广域差分定位系统又称星基增强系统(satellite-based augmentation system,SBAS)或星站差分系统,
3 r3 y8 K Q4 J6 J" U& } 是利用地球静止轨道卫星和全球分布的参考站(位置已知), 对导航定位卫星进行监测, 获得原始定位数据(伪距、载波相位观测值等), 并送至中央处理设施(主控站),
, w- S$ Q: m* x( C8 K# N0 r 将GNSS定位测量的误差源进行区分和模型化, 算得每一种误差的修正值, 并将修正值通过上行注入站发给地球静止轨道(geostationary Earth
4 }6 H+ w+ Z% D# L orbit,GEO)卫星, 再利用数据通讯链将修正值播发给广大用户, 对用户测得的坐标值加以修正,
j# e3 @. `, c) R 从而提高定位测量的精度。广域差分定位系统将星历误差、卫星钟差和电离层时延等组成的误差校正矢量提供给用户, 用户通过这种误差矢量校正技术,
; P! {9 g' p! l5 _7 r 既可以克服局域差分技术中定位误差对基准站和用户站之间的时空相关性, 又能达到局域差分定位系统的精度水平。因此,从理论上讲, 在广域差分定位系统中,
9 ]- k$ T+ G S1 E2 r 借助于强大的数据通讯链, 用户与基准站之间的距离不受限制。目前SBAS 星站差分有美国的广域增强系统(wide area augmentation
5 ?! b; n& t9 e0 r- ?* s+ k aystem,WAAS)、欧洲的静地导航重叠服务系统(European geostationary navigation overlay
% j; ~5 O7 }& u9 ^+ [5 q/ _ service,EGNOS)、日本的多功能卫星增强系统(multifunctional satellite augmentation system,
+ S+ C+ {9 ?/ o1 d# c MSAS)等, 在我国海域SBAS 星站差分可以采用覆盖亚洲大陆的日本MSAS 的免费部分[5-8]。
) N* V0 i/ Z t- h/ ?/ C 中国精度ChinaCM 差分系统也是一种星基增强系统, 是北京合众思壮科技股份有限公司于2015 年6月推出的,; j6 Z0 D1 e0 q6 l8 I7 b4 W
是一套兼容BDS、GPS、GLONASS 等导航定位系统的综合服务系统, 目前尚处于设计试验阶段。其设计理念是: 利用全球范围内的CORS% x. d6 ~$ ` V9 e8 y% C
站,通过数据通讯网络到星基增强数据中心,计算出3 类广域差分定位系统中的误差修正值, 即每一颗GNSS 卫星的星历误差、卫星钟差和电离层时延等误差修正值;* q% I3 Z4 r3 ]" k$ m
然后通过数据通讯网络将这些误差修正值上传到专用的通信卫星,通过L 波段地球同步轨道通信卫星向全球播发差分数据;- n. a. y2 J( }9 w
用户端接收该差分数据。根据用户定位服务的等级需求和GNSS
( l$ b) E6 u3 P v F4 T 接收机自身的数据,差分定位精度可分别达到米级、分米级和厘米级,使地基增强局域差分系统的信号无法到达的,如高山、沙漠、海洋等区域也能够实现类似局域差分系统的高精度的定位服务[11]。 G) G8 l7 W) a' ]3 I
2 差分定位精度实测试验
) a- X, I, p* ~3 }0 ~ 为了验证上述RTK 常规差分、Beacon 信标差分、MSAS 星站差分、ChinaCM 星站差分等这4
4 `& ?# t# I. `( o. x& m+ b 种差分定位方法的作用距离和定位精度,本文将实测试验分为3 次: 第1 次试验地点设在内陆, 第2 次试验地点设在海岸边, 第3 次试验地点设在海上。
, b$ D$ V' o3 Z5 x 2.1 实测试验1
7 s7 C8 c+ K. q. N7 o 2.1.1 试验仪器及方法
" G) _8 Z+ r5 L7 { 本次试验地点位于天津市滨海新区, 且离海边约40 km 的一处内陆开阔地带。
# H5 t4 F- H" e* e& Q" x 试验所用仪器:2 台海星达H32 型接收机(RTK 的平面定位精度: ± (10 mm + 1 × 10-6D )),2 台Hemisphere
1 L% C- i' k/ A) e2 n" S1 P% R R3 30 型接收机(平面定位精度:±0.3 m),1 台合众思壮G10A 型接收机(平面定位精度: ① 常规RTK: ± (8 mm + 1 ×10-6D );②中国区域的精度:±(5 ~1 2 cm)。 0 q' |' M! q, _1 E5 P
本次试验是将1 台海星达H32 型接收机架设在一个已知点上作为基准站, 其余接收机均任意设站,其中另1 台海星达H3 2 型接收机采集常规RTK
! X+ p: d# s) I9 R5 m' A4 w: d 差分数据,2台Hemisphere R330 型接收机分别采集Beacon 信标差分数据和日本MSAS 星站差分数据,1 台合众思壮G10A. e6 `" J4 o8 ]1 n
型接收机采集中国精度ChinaCM 星站差分数据。所有接收机连续采集1h,采样频率均为1Hz。
% L: S. X3 G# i t; a M 2.1.2 试验结果与分析
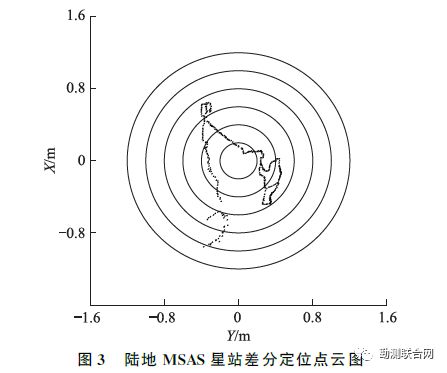
& c9 E7 B% d2 g 图1 ~ 图4 分别为本次在陆地(离海边约40 km)试验的RTK 常规差分、Beacon 信标差分、MSAS 星站差分和ChinaCM P, \' j9 l& _* t% w* g
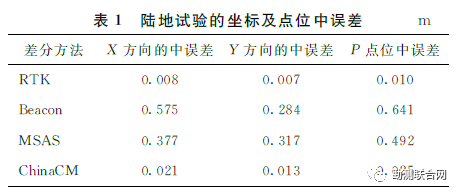
星站差分的定位点云图。表1 为本次试验的坐标及点位中误差。
9 F4 ~/ @3 R- L9 w5 \' O; A 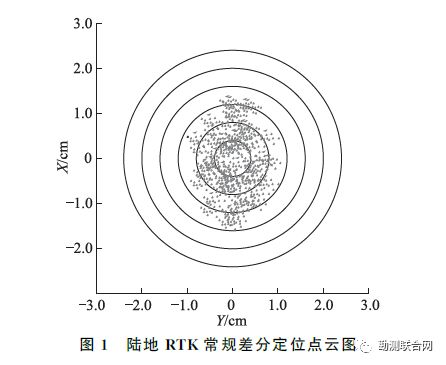
/ J0 k" i9 M! R8 b9 v% t& Z9 h2 F7 d 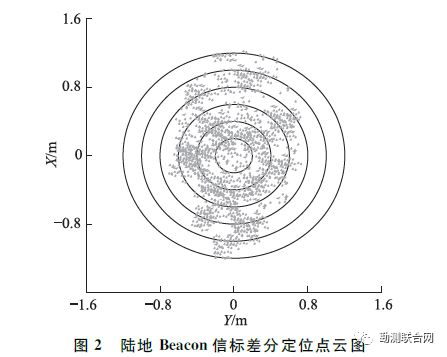
4 J( w/ J0 d7 F& w9 _: k* { F {
(说明:与数学坐标系相反,图中为测量坐标系,竖轴为X 轴。) ! H% @, H% o; k% r! V
' c0 u F3 M+ n 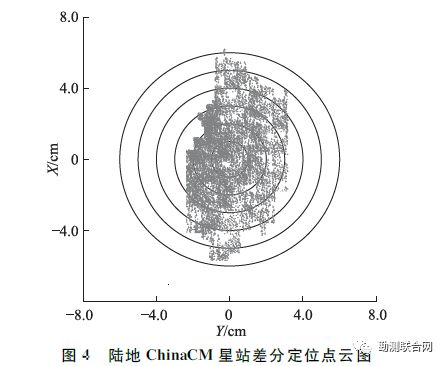
( v. u6 J- Y+ g* ]2 ^6 M
A, v) o" p# c 在图1 ~图4 中,点云图都以6 个同心圆为参考背景, 图1 和图4 的最大同心圆半径分别为2.4 cm和6.0 cm,图2 和图3/ [+ }9 \5 }- _$ w! S
的最大同心圆半径均为1.2 m。从图1 ~图4 可以看出:在离海边约40 km 的内陆,RTK 的离散度最小,点云基本都集中在2.0 cm
: |; n6 e H/ I; {: | 以内,与常识相符;ChinaCM 的离散度次之,其X 方向有极少数超过6.0 cm,Y 方向都在4.0 cm 以内;Beacon 的离散度最大,其X3 `+ k# \# D# ]( j6 M9 Z
方向有少数超过1.2 m ,Y 方向都在1.0 m 以内;MSAS 的定位点云是沿着一条明晰的连续曲线漂移,其漂移曲线的范围为X 方向在1.1 m
% B" @; F1 F# n1 D6 ^5 L# y6 E 以内,Y方向在0.7 m 以内。
! e* a9 w4 |2 X$ U* Y1 L1 E 从表1 中可以得知,RTK 和ChinaCM 的点位中误差均在厘米级,分别为±1.0 cm 和±2.5 cm;Beacon 和MSAS+ p4 l# |$ w* N# u' K
的点位中误差均在分米级,分别为±6.41 dm 和±4.9 2 dm。 & u3 N9 P# A( z
2.2 实测试验2 6 R% T7 r1 Z- [4 Y; h6 C4 t
2.2.1 试验仪器及方法
% R1 c+ T3 s9 x; G8 ?2 E 在本次和下次试验中,RTK 常规差分方法不再参与试验。 0 Y7 r* p9 u- y* _+ t9 M \$ H( r& V
本次试验地点位于天津市滨海新区的一处海岸边上。与试验1 相比, 除了不再用2 台海星达H32
" U* [3 e; I1 Q% w 型接收机以外,试验所用仪器、仪器的采集时间和采样频率均与试验1 相同。 + n1 B! Z! j7 X: n7 z2 ^& A
2.2.2 试验结果与分析
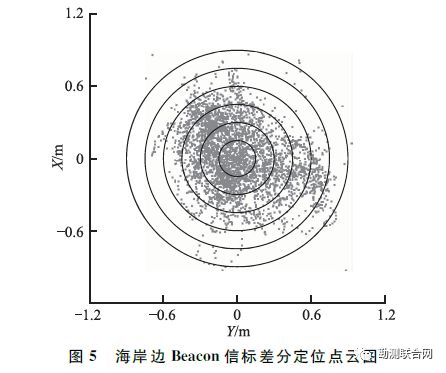
* m, Z8 n+ ]. w 图5~图7 分别为本次在海岸边试验的Beacon 信标差分、MSAS 星站差分和ChinaCM 星站差分的定位点云图,表2( F' A) }9 u0 `& L& P
为海岸边试验的坐标及点位中误差。 * M$ `0 f/ a* F5 @! |8 H. g
在图5 ~图7 中,点云图亦都以6 个同心圆为参考背景, 图5 和图6 的最大同心圆半径均为0.9 m,图7 的最大同心圆半径为4.2 cm。 3 Y4 B) [+ I' Q
% P3 `" H O3 B1 m6 g0 P 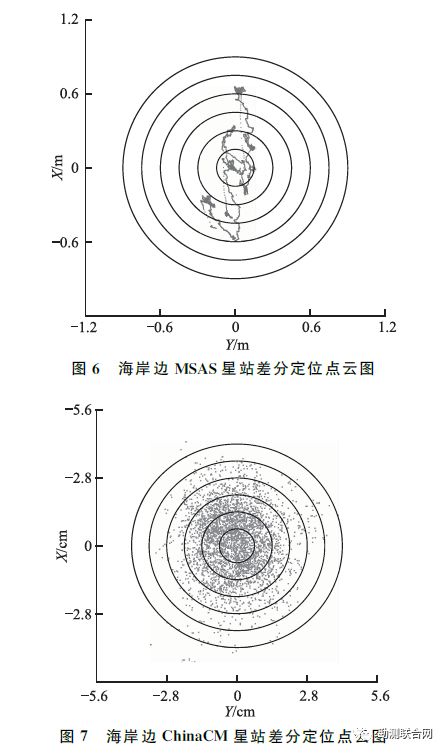
- S4 c- B9 [# b6 |1 u8 D0 k
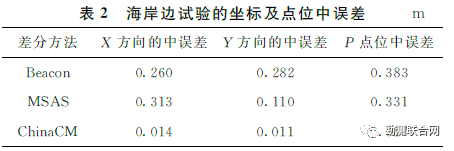
, L* v& e+ }8 @' C% V, X 从图5~图7 可以看出:在靠近海岸边上,ChinaCM的离散度最小,除了极个别以外,基本都在4.2 cm 以内;Beacon' ~& }$ y% k; E3 [6 @$ z) L
的离散度还是最大,除了极个别以外,基本都在0.9 m 以内;MSAS 的定位点云亦是沿着一条明晰的连续曲线漂移,其漂移曲线的范围为X 方向在0.6 m 以内,Y2 n l. K. c% L5 o/ E. g3 Z5 \
方向在0.3 m 以内。 & `1 \9 S' h. f& |- V6 Q9 S
从表2 中可以得知:ChinaCM 的点位中误差为厘米级,为±1.7 cm;Beacon 和MSAS 的点位中误差均在分米级,分别为±3.83 dm
& k: C$ {; k7 } 和±3.31 dm。这3 种差分定位方法在海岸边比其在内陆的点位中误差都要小(参看表1 )。 3 t8 T2 z& S* `0 ~/ S. D0 N+ q
2.3 实测试验3 8 s4 Y/ e6 a+ k3 z
2.3.1 试验仪器及方法
( x1 M# w1 Z8 `# y( Z6 _5 e& d 本次试验地点位于渤海海域且离岸约80 km的一座海洋石油钻井平台上。试验所用仪器、仪器的采集时间和采样频率均与试验2 相同。 8 g X( i( H* S) D4 _
2.3.2 试验结果与分析 ( U! m' U0 F( N
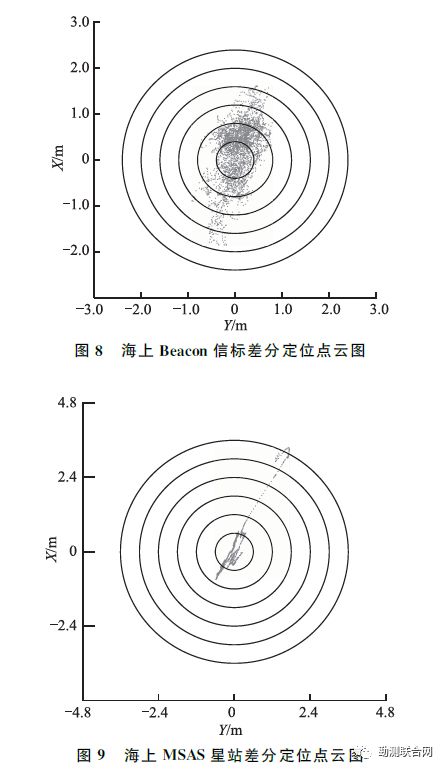
图8~图1 0 分别为本次在海上试验的Beacon信标差分、MSAS 星站差分和ChinaCM 星站差分的定位点云图。 1 | R: {$ D* o/ o3 R/ L
: X2 ^' v1 [: m9 G 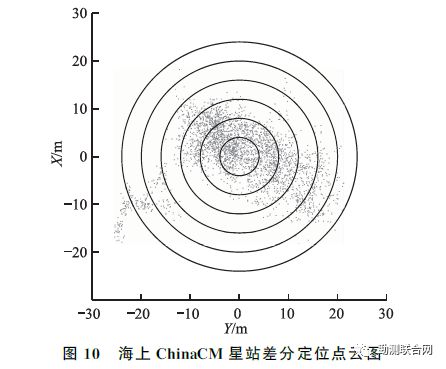
9 \! u o! X6 G1 X' l3 |" F5 v2 [ 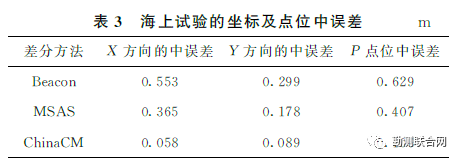
5 e. O( C! c; S 在图8 ~ 图1 0 中,点云图亦都以6 个同心圆为参考背景,图8 的最大同心圆半径为2.4 m,图9 的最大同心圆半径为3.6 m,图1 0
/ i6 C$ A, I" | 的最大同心圆半径为24 cm。从图8~图1 0 可以看出:在离岸约80 km 的海上, 还是ChinaCM 的离散度最小,除极少数以外,基本都在24 cm
0 H, x% u; ~. T* N) T 以内;Beacon 的离散度的最大范围比MSAS 的要小,X 方向在2.0 m以内,Y 方向在1.2 m 以内;MSAS
- b- }6 |* @' g" d8 c 的定位点云是沿着一条明晰的具有一定直线度的连续曲线漂移,其漂移曲线的范围为X 方向在3.6 m 以内,Y 方向在2.4 m 以内。
5 v" B* g" c* k% U3 _. N y# N4 _ 从表3 中可以得知,Beacon、MSAS 和ChinaCM的点位中误差均为分米级, 它们分别为±6.2 9 dm、±4.07 dm 和± 1.067 S. m' }1 x- A, o: F7 y3 }
dm。Beacon 和MSAS 与它们在内陆的点位中误差相当,但比它们在海岸边的点位中误差要大(参看表1 和表2 ),ChinaCM6 P) c1 t0 X. p
比其在内陆和海岸边的点位中误差都要大得多(参看表1 和表2)。 , S1 J6 i, e$ i4 X' K7 ]
3 结束语 + `$ b" k0 f r; B, ?
1 )RTK、Beacon、MSAS、ChinaCM 这4 种差分定位方法中,还是RTK 常规差分的精度最高(点位中误差在厘米级:±1.0
! w0 j7 F" Z- k' ^4 N- g cm;定位点云范围在2.0 cm 以内), 但众所周知其作用范围较小(10! _% E2 e! E/ \
km),因此,对于离岸线较近且要求定位精度较高的海洋测绘,可以考虑采用此方法。 : V4 I# b, z. C8 n/ w( [
2)Beacon 信标差分定位的精度为分米级, 其最优精度在海岸边:点位中误差为±0.3 83 m,定位点云范围在1.0 m 以内;在离岸40 km
) T6 P2 T, I1 p& s; K5 _% S 的内陆和离岸80 km 的海上, 其点位中误差基本相当,分别为±0.641 m 和±0.6 2 9 m,定位点云范围分别为1.4 m 和2.0 m。
! c8 a' h& p9 h9 E1 d; x0 n 3)MSAS 星站差分定位的精度为分米级, 最优精度亦在海岸边:点位中误差为±0.3 3 1 m,定位点云范围在0.6 m 以内,在离岸40 km% Y6 y1 [- _' I/ V) O } v
的内陆和离岸80 km 的海上, 其点位中误差分别为±0.49 2 m 和± 0.407 m, 定位点云范围分别为1.1 m和3.6 m。另外, MSAS
9 l9 i$ m2 D G, e9 T 星站差分定位有一个不同于其它几种方法的特性:MSAS 的定位点云是沿着一条明晰的连续曲线漂移,由此可以认为,即在较短的时域内, 它具有较高的内符合定位精度。
& i* n c6 ]9 z& {5 M; e 4)ChinaCM 星站差分在离岸40 km 的内陆和海岸边的定位精度均为厘米级, 其点位中误差分别为±2.5 cm 和±1.7
; h2 t' y9 K+ L- d ^$ ~ cm,定位点云范围基本在6.0 cm 和4.2 cm 以内;在离岸80 km 的海上的定位精度为分米级:点位中误差为±1.06 dm,定位点云范围基本在2.4 M& Q2 R4 q& N& L% y' h* l
dm 以内。 % @# [# Q/ |0 c1 w' m3 k7 K
5)由于在离岸超过300 km 的海上,本次试验未能找到固定平台或稳固不定的仪器架设点, 因此无法进一步测试或验证Beacon、MSAS* H' Z) v) M) i+ S
和ChinaCM,相信Beacon 将不能使用,MSAS 能继续使用但其精度怎样?而ChinaCM 是否能继续使用?精度又如何?值得进一步试验研究。
" ~5 ?- ]7 @1 \. q4 u 参考文献:略 - E. w- D6 W% {, o; U) `
声明:勘测联合网转载本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有。 推荐阅读重任在肩,使命催征---记海洋军事测绘生力军大连舰艇学院测绘系青年教员群体 , i, N& S8 k9 @0 {
利用GNSS RTK高程拟合代替四等水准的可行性分析 8 _! Y; E" E$ |
基于车载移动测量的GNSS定位方法 8 [' M8 U& Q% z" p, T1 B
GNSS精密单点定位技术及应用进展
7 i# k. _- b/ S- Q GNSS辅助摄影测量中几个问题的探讨 , _1 y f2 J- a
GNSS互操作若干问题 % ^; {. J$ c$ n M
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
8 N) p4 v7 U) G3 Q: ?% m( `9 [6 p% {4 t8 V& ?$ [
( z- I ^7 i) y7 [- i
( P( G" M# }/ L" m$ O4 s* D
# R6 K7 K g0 p: Z. `2 F | 

