|
, R$ Y6 U% K/ X* r
 烟台科勘海洋科技有限公司 烟台科勘海洋科技有限公司
: A/ v, R4 P9 n 烟台科勘海洋科技有限公司,成立于2022年,是一家海洋观测、监测系统开发及制造的研发中心,同时也是海洋环境服务和海洋工程关键配套系统开发的科技型中小企业与创新型中小企业,秉承“科学管理、勘定深海”的精神,聚焦智能化海洋观监测装备研发与近海工程安全保障。公司的主要产品包括海洋环境监测设备、海洋灾害观测浮标、海洋数据采集系统等,为海洋科研、环境保护、灾害预警等领域提供了先进的技术支持和解决方案。
% w/ F6 A; M3 j: ?& |9 D' j1 f6 o 一、产品概述
0 K( U: F6 _6 z% V( F5 } 烟台科勘海洋的这款波浪浮标是一种利用重力加速度的原理来测量波浪的小型浮标测量系统。它能够实时获取波浪的波高、波周期、波向、一维能量密度谱、二维方向谱等海洋环境信息。它测量精度高,体积小,重量轻,布放和维护简单方便,采用数传电台通讯方式,专门适用于海洋科学考察船短时一次性投弃漂流观测使用、随船使用和实验室教学使用。
7 {8 _; G# a F; @7 r, a 该型波浪浮标是一种快速机动测量海洋波浪的仪器,广泛应用于海洋环境调查、科学研究、海洋科学考察等领域。该款波浪浮标在船舶周围投弃布放后,开始测量波浪数据和海浪谱,并通过浮标内部的数传电台把测量到的波浪数据和海浪谱传输到船舶上的岸站数据接收系统。
) i5 {# A" x# H4 T, [8 f 该型波浪浮标中的波浪传感器,采用国产的运动传感器。 3 F" [6 x2 @8 {* [$ g
 烟台科勘海洋科技有限公司--海洋波浪浮标 烟台科勘海洋科技有限公司--海洋波浪浮标
4 [! c4 W$ F& h& X6 [1 [9 [
二.技术指标 ! V, S: e5 |( X0 M* U$ x4 w: g7 u* x
(1) 波浪高度:测量范围(0m~30m),测量准确度(±(0.2+10%×测量值)m);
2 m. }( X( b; M' V. S$ c* \/ C4 A (2) 波浪周期:测量范围(2.0s~20s),测量准确度(±0.5s); 0 l! a3 S* i4 V! G4 L
(3) 波浪方向:测量范围(0°~360°),测量准确度(±10°); % h( A+ G l5 M& e' B; _0 C( h( t
三.性能指标
1 a* N( |4 F9 U& Y9 j (1)尺寸与重量:球形,浮体直径0.25m,重量约4Kg; % e4 M1 r, e/ m% Z( X7 b
(2)通信方式:采用433MHz数传电台通讯。在陆地上测试,在晴朗天气,空旷环境无遮挡、12V/2A电源供电、5dBi吸盘天线,天线距离地面高度2米,使用出厂默认参数的情况下,其通信距离为12Km。在海上通信距离会有一定程度的减少,根据海况状态和接收天线的安装高度不同而通讯距离不同。 # ]) \! i# C# [9 H/ H
(3)观测间隔:开机约10分钟(5分钟或20分钟)后输出第1组波浪特征数据和海浪谱数据,以后每隔约3分钟输出一组波浪特征数据和海浪谱数据。 5 T+ w# |$ W4 U2 f# g* y
(4)工作时间:采用可充电高性能锂电池组供电。每次充满电可连续工作约10天左右。
- K+ W6 N3 X. }( W- L: k% o6 x (5)常规波浪特征参数,包括:平均波高、平均波周期、三分之一波高、三分之一波周期、十分之一波高、十分之一波周期、最大波高、最大波周期、波向、波数。
( W# j& x8 ~, L6 f4 M$ _: g (6)谱特征参数,包括谱有效波高、谱平均周期、谱峰周期、谱峰波向。 8 [, x- ^5 @ o! J! S
(7)浮标实时输出海浪谱信息,包括一维波浪能量密度谱和二维方向谱。其中方向间隔为1°,共有360个方向点;频率间隔为(0.5/64)Hz=0.0078125Hz,共有64个频率点,每个频率点都有对应的波向和波向扩展度。
: u+ B$ D: U: V (8)浮标为投弃式漂流运行方式,不具备SD卡数据存储的功能。
6 X7 j* s k- d0 l/ {/ | 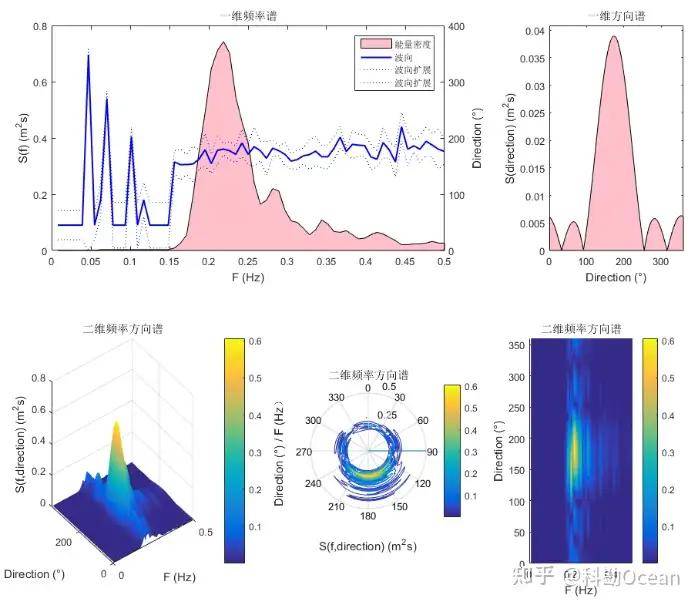 烟台科勘海洋科技有限公司--海浪谱数据显示范例 烟台科勘海洋科技有限公司--海浪谱数据显示范例
" J# V' w, O/ y1 U# B/ r4 M* g 烟台科勘的这款波浪浮标已在我国沿海地区得到了广泛应用,取得了良好的效果。未来,烟台科勘将继续加大研发力度,推出更多先进的海洋观测设备,为全球海洋灾害预警和防治事业做出更大的贡献。返回搜狐,查看更多
: V8 {' _2 E" {, @5 Q2 @
; H1 ~% ?% W& ~5 v+ i: i1 T$ q 责任编辑:
7 A4 _1 s7 l7 N c9 z- l! P- Q: N, R; l) J/ X$ e* ~( K
+ e+ Q& s# k) a/ j
7 a8 H! N; D r9 z; n
$ J; ]3 r* \8 y
| 




