|
: R& @0 c9 x. Q Y5 S/ r
本文以“深海一号”为研究对象,结合海洋安全监测技术的发展和应用现状,集成创新,完成一体化海洋监测系统总体技术方案,包括监测系统布置方案、监测设备要求、监测数据采集、监测管理软件开发和相关的智能化预报决策等。 $ g6 H8 O! R5 l4 d7 }

* f( k8 ^. h1 k' h 1 监测系统的组成 % ^0 M0 X! w* z" g
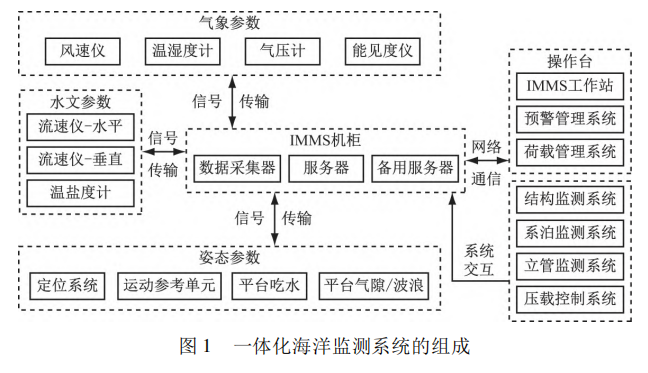
一体化海洋监测系统的主要作用包括预警监测、校核监测和损害监测,可为现场作业提供决策支持,为事故发生原因分析提供技术支持,为平台完整性管理提供数据支持等。半潜式生产储油平台一体化海洋监测系统包含6个子系统,分别为海洋环境监测系统、平台位置和姿态监测系统、浮体结构应力监测系统、系泊监测系统、立管监测系统和压载控制系统。除了海洋环境监测系统、平台位置和姿态监测系统以外,系泊和立管等子系统中部分重点结构或器件的内部监测往往要与具体采用的设备结合,各自自成体系,但自主开发的一体化系统可通过专用接口与这些子系统进行数据交互。一体化海洋监测系统的组成见图1。 # l% C2 |5 ^1 {5 n
) z% c- ]& a8 u1 C 2 监测设备及相关技术要求 / t/ h7 _8 ?+ n% X J9 \1 ^/ ]. c' I
一体化海洋环境监测系统所有的设备仪器都需满足适应海洋环境的高湿度、高温度、高盐度和易腐蚀等要求,能适应平台运动(尤其是倾角和加速度)的要求。对于关键监测参数,为确保监测数据的可靠性和冗余性满足要求,系统需多配置一个相同的监测设备,分别布置在平台的不同位置处。 ) N0 h, C/ N" F% c
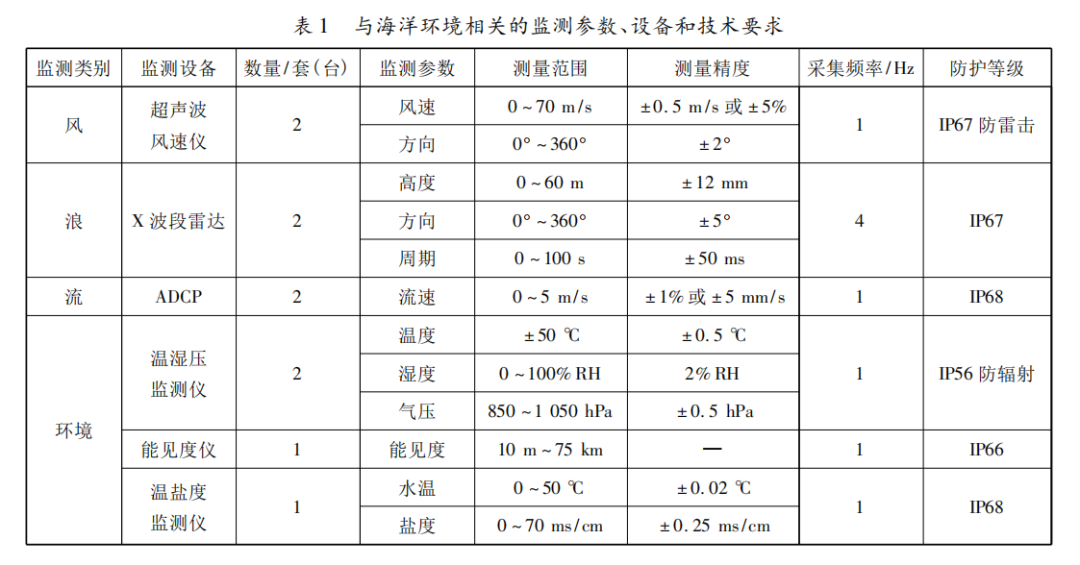
海洋环境是造成平台响应的主要因素,其监测内容主要包括风(风速和风向)、波浪(有义波高、平均周期和平均浪向)、海流(不同水深处的流速和流向)、环境温度(空气和海水)、湿度、海水盐度、大气压和能见度等。风不仅影响平台的运动,而且影响吊机作业和直升飞机起降。测量风速和方向的仪器是风速仪,目前使用最多的是超声波型风速计。波浪是造成平台动态响应和疲劳损害的主要因素。测量波浪高度和周期的仪器主要是X波段雷达等。流不仅影响浮体水下部分,而且影响立管和系泊系统。测量流速和流向的主要仪器是声学多普勒流速剖面仪(ADCP),仪器向水中发射声波,声波在水中产生散射;ADCP接收散射体的回波信号,通过信号的多普勒效应频移分析计算流速。 : Y1 V9 d) t6 `& q+ ~3 a% H; }% d0 e
由于平台处于深水区域,需在平台上安装1台侧置式水平流速仪,用于测量安装点至水线面的流速和流向;同时,还需安装1台垂直(向下测量)流速仪,用于测量安装点至海底不同水深处的流速和流向。与海洋环境相关的监测参数、设备和技术要求等见表1。 8 W2 S! \5 _! I/ _* i; g
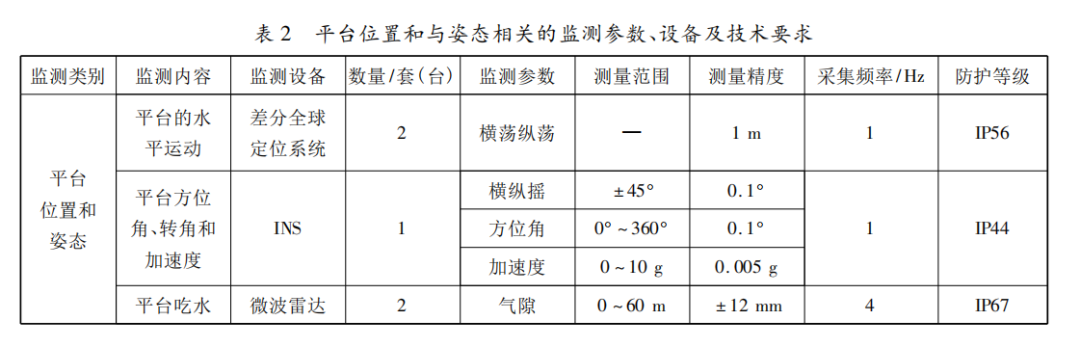
) h- K2 t# x5 O8 h+ C2 G& i 平台位置和姿态监测系统监测的内容主要包括平台6个自由度的运动和加速度、平台吃水和上部甲板气隙。平台的位置可通过定位系统准确测量;平台的水平运动(横荡和纵荡)可通过定位系统监测值计算得到;平台的方位角(艏向)和倾斜角(纵摇和横摇)可通过惯性导航系统(INS)测量。平台位置和与姿态相关的监测参数、设备及技术要求等见表2。 3 w- S0 _" a) y: Q1 E4 ]( P( \
& Y9 V2 ]# J$ ~" l( T3 }5 M( I
浮体结构应力监测系统主要根据计算分析结果确定应力关键区域,从而布置传感器。结构应力监测结果可用于校核计算分析结果,探测早期结构破坏或恶化情况,估算实际疲劳损害情况和剩余寿命。实际应用结果表明,传统电阻应变片布置在水下容易失效。近年来,光纤应变传感器因具有灵敏度高、耐腐蚀、频率高、质量轻和抗电磁干扰能力强等优点而广泛应用于复杂环境下的海洋工程结构监测中,尤其是水下监测中。光纤布拉格光栅传感器的光栅阵列数量一般为2~10个,波长范围一般为1510~1590nm,中心波长偏差为±0.5pm,波长精度可达到1pm。
7 A. N+ ]/ |' V7 `, t( i 平台系泊监测系统监测的内容主要包括顶部张力、平台顶部链收放长度,以及顶部链环停留在止链器上的编号和停留时间。系泊缆张力和收放长度监测可直接通过系泊系统的起链装置自带的可编程序控制器(PLC)实现。一体化海洋监测系统只需提供与PLC的接口。系泊缆链环停留在止链器上的编号和停留时间可通过对系泊缆收放长度的变化进行计算得到,可用于计算系泊缆的长期损害情况和剩余寿命。该系统的监测最好是针对每根系泊缆,或每组至少监测2根,以确保冗余和相互校核。
1 A: {( ]3 G$ F7 ^- e 立管是海洋油气生产的核心部件,尤其是钢制悬链线立管的疲劳损害是平台完整性管理的重要部分。对于深水立管,监测的内容主要包括顶部张力、柔性连接头转角、涡激振动响应和疲劳损害等。监测设备包括在关键区域布置的应变片、沿长度方向布置的运动传感器和在顶部柔性连接头布置的转角测量计等。对于深水部分的监测,需采用声波传输技术进行信号传输,从而避免硬连线带来的复杂性。 9 h% @ W5 O9 S E/ m! n9 o
压载控制系统用于对所有的压载舱进行加载和卸载操作。平台在位作业时,通过压载系统调整平台姿态。压载控制系统主要监控所有舱室的液位,以及阀门、泵和水密门/通道等的状态等。压载控制系统一般自成系统,但其监控显示一般需集成到一体化海洋监测系统中。 ]+ f {! d3 r
一体化海洋监测系统除了监测传感器及附属设备设施(电缆、接线盒和支架等)以外,一般还包括控制室和操作台设备,如控制机柜、服务器、网络交换机、信号调解器和电源供应分配模块等。为保证平台在台风撤离期间能采集到重要的环境和平台响应数据,系统需配备不间断电源,供电时间应不少于72h。 2 m( _" M- f1 _6 p# U! n
3数据采集及存储方案
/ g1 e; U0 T8 e5 T2 S9 x 半潜式生产平台一体化海洋监测系统将用于收集、显示和备份/存档所有子系统实时监测的数据。这些数据来自监测仪器的模拟信号或数字信号。布置于机房的服务器将作为采集主机,备用服务器作为冷备份主机。储存在服务器中的数据既包括直接监测到的数据,如风速、风向等,又包括间接计算得到的数据,如通过定位系统监测的数据计算得到的平台位移和通过气隙监测的数据计算得到的平台吃水等。为实现远程监控和“互联网+”数据共享,一体化海洋监测系统的数据与平台上其他监测控制系统的数据综合到一起,形成“平台数据中心”,通过卫星通信传输给陆基数据中心。监测系统各设备的采集频率一般不同。例如:系泊系统张力含16个通道,采集频率为0.5Hz;平台姿态含9个通道,采集频率为1Hz等。实时监测的数据通过基本的过滤清洗操作之后保存在服务器上的数据库中,记录频率统一为1Hz。监测数据的类型一般为浮点数,存储小数点位数一般根据测量精度和实际需要而定,例如:温度和压力采用1位小数;风速、流速和浪高等采用2位小数;全球定位系统坐标至少需要6位小数等。 8 z( e7 ?$ ^" O$ m% G0 h, w" V
4 智能化功能开发 1 K+ r" {. r: d! G
半潜式生产平台对环境极为敏感,立管安全作业依赖于系泊系统的完整性。因此,一体化海洋监测系统将平台姿态预报功能嵌套集成在软件中,用于指导现场作业,提升平台的安全性和可靠性。
7 r/ x& i" ]% U8 x, y0 u0 V 姿态预报是指基于平台大量的时域耦合计算统计和拟合结果,根据实时监测或预报的环境数据预估平台响应,从而实现在台风来临前对平台恶劣响应的预报和评估,提前做好相应的准备。预报结果为一个中心值,以及在给定的置信度(90%)下的置信区间,平台姿态智能化预报算法流程具体如下: " P4 n. V( q$ h& C; W
1)根据风速和流速,以及平台环境荷载系数、系泊系统刚度曲线等计算平台姿态响应均值; 1 G- B5 U( a- u( N* \
2)根据时域耦合计算统计结果拟合得到动态修正系数和波高计算平台响应;
% G6 s/ {8 e: I 3)基于预报与实测数据存在差异的历史数据,通过自学习得到相应的预估误差修正系数,进而得到最终的平台姿态预报结果。
+ z! z0 y+ K9 `; J, i 5监测系统软件集 % q; s3 C: q. C$ N. n1 W. x
成为避免相互孤立,一体化海洋监测系统通过网络将各监测子系统的数据集成在一起,通过统一的软件展示,从而使作业人员能综合评价平台的整体状态。该软件包含数据采集模块、数据显示和分析模块和智能化预报模块等3部分。为使作业人员对平台实时姿态有直观的了解,从而支持作业决策,该软件还将对平台的实时姿态进行三维动画显示。
; Z2 s9 k3 u% V' M; p$ |6 L 1)数据采集模块将安装于机柜的服务器上,其主要功能将包括:
/ y& B1 y- S% R$ q% s" j9 U6 n) M (1)监控每台传感器的运行状态;
, w7 w$ O6 b- B7 u (2)实时对每台监测传感器进行数据采集、过滤和清洗,并将所得结果同步记录于数据库中;
2 X9 G1 A" `7 V) v2 U- k. I (3)定义与平台相关的“常量”,并计算“间接”数据通道;
" |. y7 U' B/ j. X& p" B (4)对数据进行储存管理和备份存档管理。 ; g; N6 V1 o$ v
2)数据显示和分析模块将安装于操作台的计算机上,其主要功能包括:
; A H2 {& v U9 f (1)提供友好的人机交互界面; ! }6 B' r- f3 W
(2)对监测数据用图像和表格形式进行可视化显示; $ ^' N1 g& S1 F# b- R7 K8 Q# U2 X
(3)对历史数据进行时间序列显示和统计分析; : Z- H" k6 i$ U, W+ O: q# Y# G; C
(4)对异常信号进行预警; . |4 ~+ V; y* }/ V* w p( B
(5)自动产生日报和月报等。
9 O D9 x1 w- I' M- n r- _0 w" Q 3)智能化预报模块与数据显示和分析模块集成在一起,其主要功能包括: ) t, }0 O, l+ `# ?
(1)根据实测(或预报)的环境数据和用户设置的置信度,通过算法预估平台的姿态中心值和置信区间; " \% Q& t, p" u& h
(2)可视化显示平台实际的姿态和预估的姿态;
) h. e- _, _9 X9 S (3)基于历史数据(预估姿态与实测姿态的差异),通过自学习计算得到和保存预估误差修正系数。
' `6 u+ J! _& j( L 当前我国的海上油气开发正逐步由浅海走向深海,已开始采用技术先进的深水浮式生产平台。一体化海洋监测系统是确保深水浮式平台安全运营的重要装备之一。本文以我国南海陵水气田的“深海一号”半潜式生产储油平台为研究对象,综合海洋监测技术和信息技术,进行了一体化海洋监测系统总体技术方案设计,新增了智能化预报和决策监测软件模块。该深远海平台一体化监测系统的开发有助于我国海洋平台监测网络化信息管理平台建设,为海洋工程的科研、设计、生产、运维和完整性管理提供服务。
, z. H; B6 n6 s, W( K7 M7 }$ e. [/ C N 信息来源 | 《船舶与海洋工程》2023年第39卷第一期 6 o l/ D' l j% \$ |! P
本文作者丨武永锋 何骁勇 陈勇军 中海油海南分公司等 / U( _; c3 e7 q: r# J, h. I

/ S# P! V# G p, t
声明:本公众号相关内容均来自主流媒体及公众号,非商业用途,并不意味着赞同其观点或证实其内容的真实性。版权归原作者所有,如有发现侵犯您的权益,请后台联系编辑,我们会尽快删除相关侵权内容。
6 E( ^ n' w0 B$ U8 [4 n0 d8 x. v3 B! B) ~* K, i
3 Z0 ~4 K( V0 F! o9 M4 q& u' L% M1 I+ g" k
) _: @( Z: B( M# X
| 

