据不完全统计,我国海上风电塔有4300个,但可以潜入水下60米的专业检测人员却不到200人,作业过程不仅需要专用潜水设备和支持母船,而且还要看海况和天气,存在作业窗口期短、风险大、成本高的特点。% \. w8 }* A M7 |, x# w
日前,哈尔滨工程大学研发的国内首套海洋结构物水下无损检测机器人,通过了科技部相关部门的验收,成功解决了这一问题。这名“深海医师”可用于水下500米,实现了国内水下无损检测的工程化示范应用,填补了该领域的国产空白。% S9 T/ f L+ u" u) {
- B0 x N' s G设备下水 # ]3 S2 [" r, C; L4 Q* Z/ e
“作业水域较深时,人工下水检测过于危险,而且成本过高,这种方法很大程度上取决于探伤人员的经验和技术,国外已经研制了一系列的水下检测机器人,但国内在该领域仍处于起步阶段。”哈尔滨工程大学船舶工程学院教授王刚说,面对这一痛点,他们带领学生在5年前开展了水下检测机器人的研发。, x8 I Y7 l7 y- r
水下作业不同于陆地,不仅面临水深的影响,而且扰流复杂,如何保证检测过程中机器人和探头的稳定,是极具挑战性难题。值得一提的是,这些难题均被平均年龄不到23岁的团队一一攻克了。
) `3 W1 d# z" Q% t! i: @团队成员陈思文来自哈尔滨工程大学的新工科专业——海洋机器人专业。“我从小就喜欢机器人,入学后进入团队,发现要学的知识太多了。”他说,他们一边学习专业知识,一边进行实践研究,并从中发现问题,“我们用了一年的时间,自学了机器人技术中的设计、控制、感知等很多专业知识,还让机器人也学会了自主学习。”( b# I% Z, j7 K I
; \" o8 H* _- Y学生团队进行研发测试 + u' U+ \7 E3 j* ]# T
“学院一直致力于培养行业创新型新工科人才,特别注重学生的实践能力,学生在大一的时候就可以进入我们团队,在老师和学长的帮助下探索入门,很多大二学生研发的相关技术已经运用到水下检测机器人上。”王刚说。; ?. P$ M+ [0 z! `, P8 M
“目前,市场上运用的检测工具需要两位检测人员分别在水上和水下密切配合,而我们的技术给机器人增加了辅助定位系统,降低了检测人员的操作复杂度,能够更专注于检测数据的判断,提高作业效率,整个操作过程一人就可以完成。”陈思文和同学们通过水下焊缝辅助定位系统的研发和打压试验,让机器人实现了在海底500米稳定精准操作。该技术已获得软件著作权。
/ a% Z4 L' j( q3 G0 u4 u g) q2 W/ ]# d& f- ]8 g
岸上操作
! \, b, P3 i" [! M7 O0 {8 ^
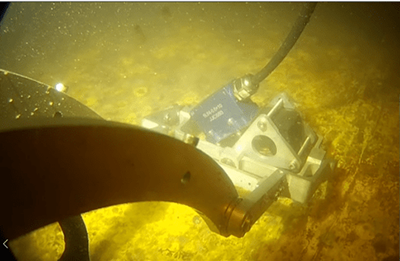
4 W' t( g6 ^+ {, n% ]3 P水下视角
6 i9 r; o$ o+ z5 ?% |记者从哈尔滨工程大学获悉,该团队通过多年攻关,还相继突破了扰流复杂吸附难、海洋结构物管径差异大、节点焊缝结构复杂等难题。去年,团队携带机器人先后在渤海锦州25-1油气田和中广核如东海上风电场进行了实际检测,机器人表现出色,完成了国内首次风电塔桩水下机器人无损检测示范应用。: l% c5 A* l- |/ y
“团队还将继续改善水下检测机器人环境感知和智能决策能力,为我国水下机器人自主环境感知与作业技术研究应用奠定基础。让我们的技术落地转化,实现大规模应用是这代人的使命,年轻的同学们经过实际工程测试,更加坚定了自己的目标。也希望更多人能加入到海洋机器人的设计研发中。”王刚说。
& O" i( k+ _0 X2 u0 G4 b7 t% W
8 O- g, \* W! Q( s) ]海试人员合影。 0 h' j9 X( K @5 E" S
该文章来源互联网,如有侵权请联系删除
6 S8 q/ v" A6 P7 b% ~, I& l查看原文:www.52ocean.cn |


 & L3 H z! y! r. Q) U
& L3 H z! y! r. Q) U
 8 c" Q5 S0 o! ^1 k) n) {
8 c" Q5 S0 o! ^1 k) n) {