" `% V# c& w8 [+ A6 L
Radar测距测速原理介绍* ^7 W# E7 B- r/ c* ]. n& T
通常来说,我们可以通过确定电磁波传播的时间来估算距离,通过多普勒效应产生的频率偏移来估算相对速度。但实际使用中我们会发现,对于没有经过调制的连续波谱(Continuous Wave),我们只发出相同的正弦或余弦信号,接收到的波也是呈周期性变化的,所以我们无从知道从发出到接受到底经过了多少个波长,从而无法确定信号从发出到接受所经历的时间(time of flight),也就无法测算距离。
, P7 `: ?+ p0 N; P, h$ V r 于是,我们引入了调频/调幅(FMCW/AMCW),使发出信号的频率或者幅度处于不断的变化中。在汽车领域,我们一般使用调频技术。下图为脉冲FMCW和正弦FMCW时间域变化图。 5 o, X6 @" C" @, \; g
* S) S0 M: G9 o9 y+ I i3 z
FMCW雷达在扫频周期内发射频率变化的连续波,被物体反射后的回波与发射信号有一定的频率差,通过测量频率差可以获得目标与雷达之间的距离信息。
0 Y; l3 _/ r9 Q FMCW雷达的测距/测速原理( N/ V$ F5 H9 Q) l2 r4 A. G1 G
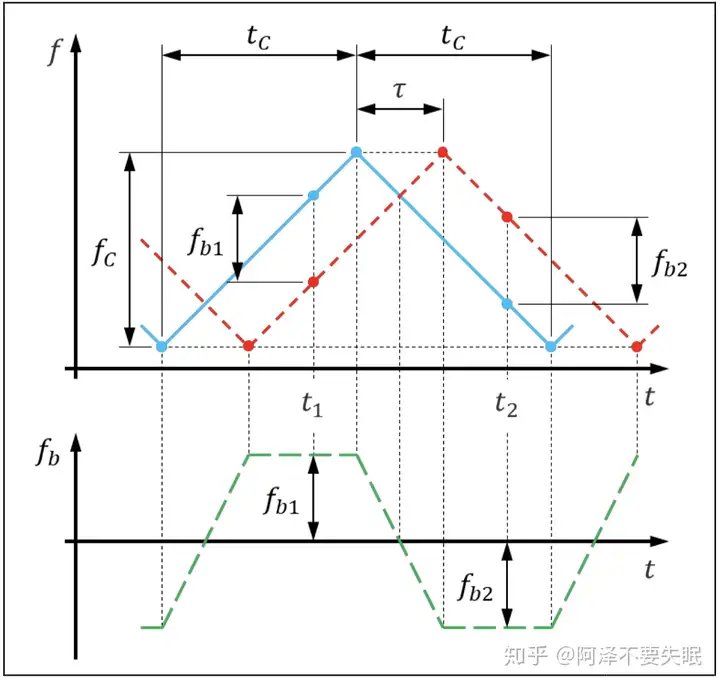
下图中,蓝色实线是发出的信号频率,红色虚线是接受到的信号频率, tct_{c} 为扫频周期的一半, fcf_{c} 为扫频带宽, τ\tau 为从信号发射到接受所经历的时间。 9 m! S! t# m! c6 Z n
+ S" e0 h& N$ V r/ k6 ? 设 ,fs(t),fe(t)f_{s}(t),f_e(t)分别为发出所发出和接受信号的频率变化函数,并假设相对速度 vrv_r 为0,则在信号的上升沿有如下关系: 3 ]- O4 M: {2 [4 t
fS(t)=f0+fctc⋅tf_{S}(t) = f_0+\frac{f_c}{t_c}\cdot{t} ,
7 E! z$ @, {3 M, j fE=fS(t−τ)f_E=f_S(t-\tau) 2 ? o n* R! N0 g7 P' y
且存在差频函数(beat frequency): # f3 E5 |4 e$ a5 `' o9 L: M4 M! ?
fb(t)=fS(t)−fE(t)f_b(t)=f_S(t)-f_E(t)
$ V& q/ `% d( V3 i( l3 y 又因为 R=τ⋅c02R=\frac{\tau\cdot{c_0}}{2} ,从上图的几何关系 fbτ=fctc\frac{f_b}{\tau}=\frac{f_c}{t_c} 中可以得出: - D$ P0 f) N' }- k2 r
R=c02⋅tcfc⋅fbR=\frac{c_0}{2}\cdot\frac{t_c}{f_c}\cdot{f_b} . V# K: R( K0 R1 G( M1 w. S3 D
从而得出:R和fbf_b 成正比
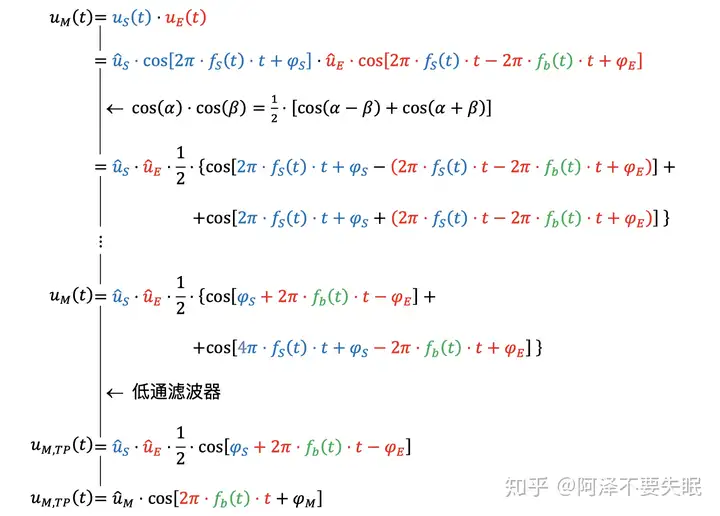
5 p6 ^6 M( @+ k 设发出的信号为一余弦波,则其时间域的变化如下:
% \; L1 T+ e, L# q S5 Z7 } 7 c: U" A: H4 {$ p# }5 O
则接收到的信号在时间域变化如下:
3 t7 b0 q$ q' K8 B' p: @
# D( M7 j0 A7 O { 将 fEf_E 带入,得到:
, O& T" T6 f. u: s2 e- I: V6 y : p& j$ E" q4 `) J
现在将 uEu_E 与 uSu_S 相乘,得到混合波 uMu_M : 9 y& A. i* s5 g2 S' |3 N* a
2 t: B2 @# j) x* |/ r# n. D9 X 从上面的推导可以看出,最终得到的混合波,其频率只与 fbf_b 有关,而所要确定的相对距离R与fbf_b 成正比,所以只要得到混合波,就能确定相对距离R! ! V P9 ~3 X" V
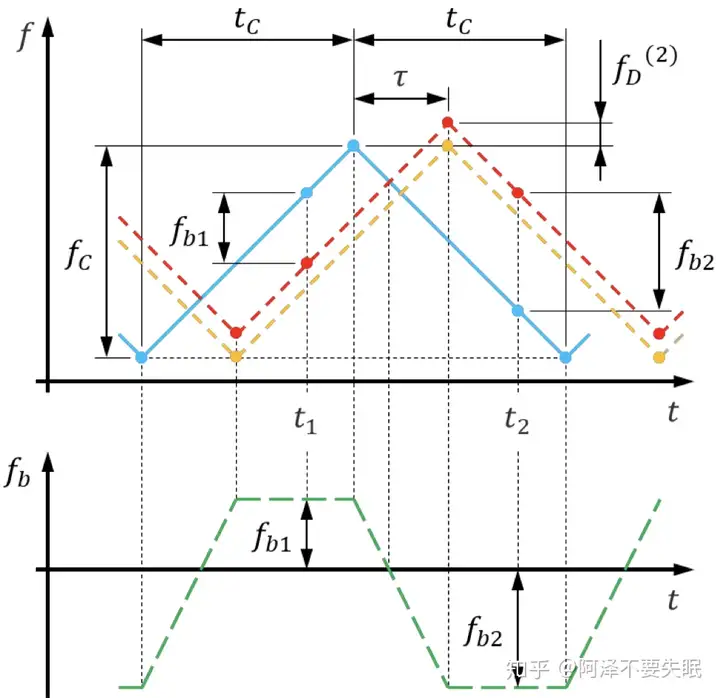
上面所讨论的是相对速度 vrv_r 为0的情况,R恒为定值。而实际情况中,我们要考虑有相对速度的情况。因为存在相对速度,距离R会随着时间进行变化,当相对速度 0">vr>0v_r>0 ,R不断增大,故 fbf_b 也不断变大;当相对速度 vr>0v_r>0 时,传递的电磁波被拉伸,频率有所减小;当
% b2 M: J; h2 b9 W! C4 a 为了简化模型,且考虑到信号从发出到接收所经历的时间极短,加速度不变,汽车相对速度几乎不变,信号频率变化如下所示:
8 F6 g% n7 C2 ~ l+ d& |& z' x 6 g5 ~# e% t) Y; u
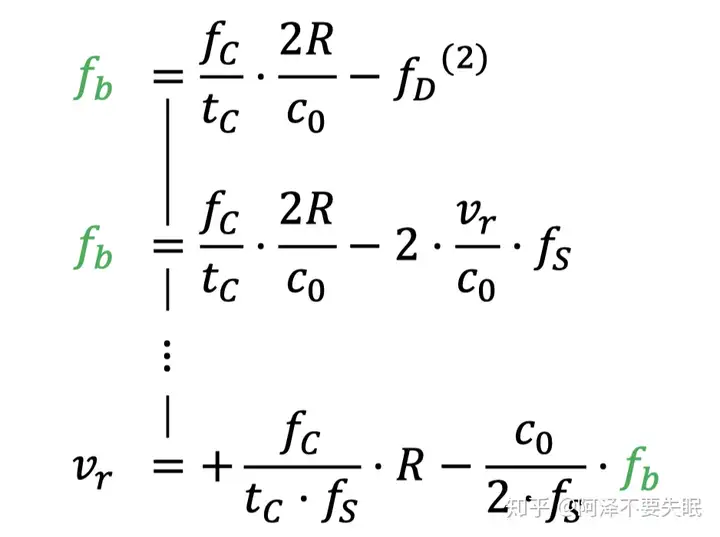
从上图关系可以看出,差频 fbf_b 从原来的 fb=fctc⋅2Rc0f_b=\frac{f_c}{t_c}\cdot\frac{2R}{c_0} 增加了 vrv_r 影响项(不考虑相对论的多普勒效应),转变为如下关系式:
: B$ {& y; f' o# V+ ?4 i$ m0 [3 J2 k ! E% ]( V9 N' [9 Q ?1 [+ I0 ^
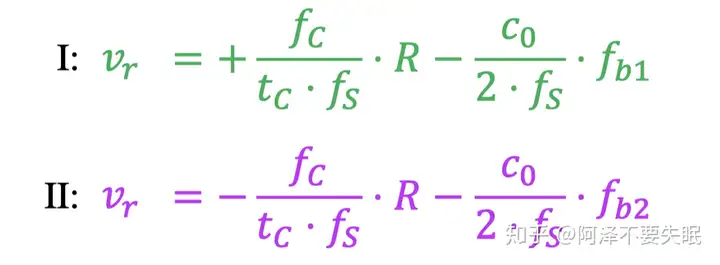
从而得到了相对速度 vrv_r 和相对距离 RR 的关系式。而为了解得 vrv_r 和 RR 的具体数值,只有上面一个式子是不够的,于是我们在信号频率的下降沿进行重复的操作,从而得到如下方程组: * o2 _ k) M! o% h
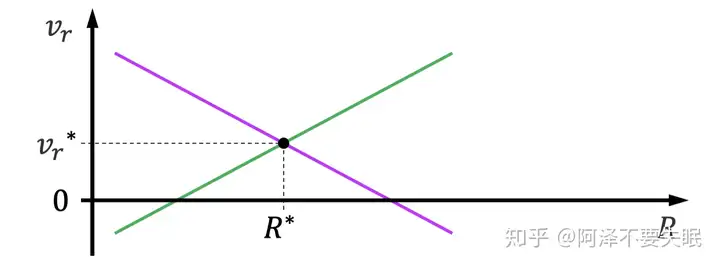
- o' Z# n4 R, \2 L+ P4 H7 d- C 其交点即为所求:
5 C- e2 y$ {! j' u
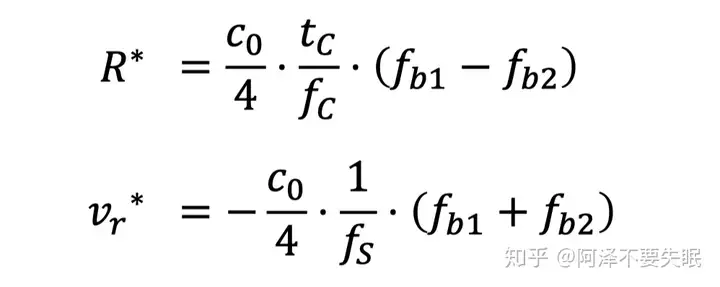
8 Y6 \ B) u7 b& H+ \9 v 可以解得相对距离和相对速度: 3 g- K6 `( r/ ^8 P" X$ u4 X
9 o! ]- n1 O5 a. m. v& ^
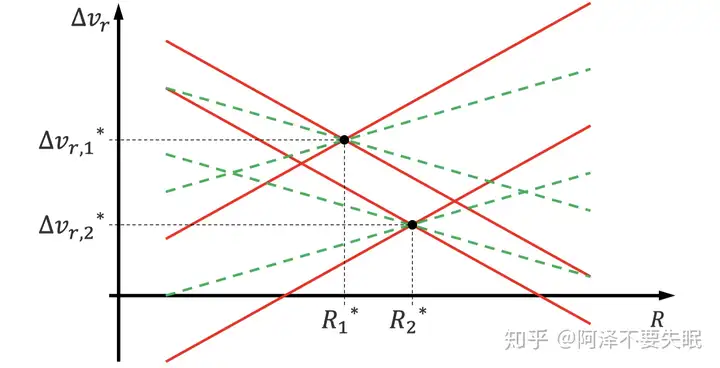
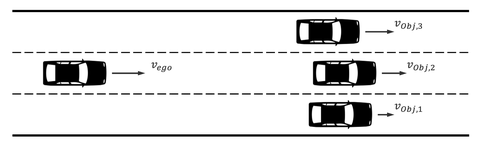
如果希望测得多个物体的距离和速度,就必须对发射信号的频率进行一定的处理,如下图所示(以两个物体为例): / j( l3 M$ a* v4 U/ w! ~
3 L, Z, H9 L- ~0 U
再进行上述一系列操作可以得到交点坐标图:
7 D/ _8 r1 t: K1 ]% [0 |# X 1 I1 C& e) q N
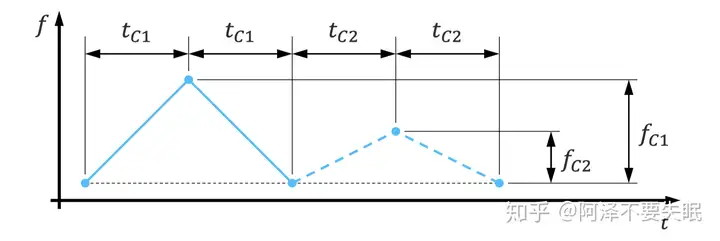
如果按照原来的频率变换进行处理,则会得到四个交点(图中实线或者虚线各有四个交点),即得到四个距离和速度,从而无法对所探测物体进行判断。而改变第二个周期的扫频带宽后,将会得到不同扫频带宽发出信号的两个共同交点,从而确定所测两个物体与自己的相对距离和速度。实际中也可以改变扫频周期,来获得不同的扫频信号,如下图所示:
6 K; J# |2 T {2 q' E# M1 V+ X3 b
" O; g/ o/ Q, b2 {: S 实际使用中,为了避免大量的计算,提高检测速度和精度,我们又引入了快速Chirp序列方法(fast cirp sequence),下一篇对此方法进行了详细介绍,并结合了实例进行分析,放个链接,大家有兴趣可点击阅读。 / R2 {! }7 s$ a; Y2 t
0 \' J2 z8 d3 U$ I8 ^5 k1 J3 E7 H 目前笔者正在学习自动驾驶中的信号处理相关知识,如有错误,望及时纠正,不吝赐教。
# e4 f- N4 E- k. }9 E, ]. n, ^2 \2 k
* T6 l# |; a i e3 L( `8 U; _, L8 Y/ z! _+ k
" ?" Z1 C3 i' ^
|