|
# C7 L* x1 f( ^$ k; w

2 }" U; W* G d9 ^& S
/ [; R; z- r5 Y& L 一、什么是海洋测绘?
) u# ^' o [) t9 a 1.1 海洋测绘(Hydrographic Surveyand Charting)是海洋测量和海洋制图的总称。其任务是对海洋及其邻近陆地和江河湖泊进行测量和调查,获取海洋基础地理信息,编制各种海图和航海资料,为航海、国防建设、海洋开发和海洋研究服务。 ( z! K G; R; @+ ` g2 P% x! K
1.2 海洋测绘的主要内容有:海洋大地测量、水深测量、海洋工程测量、海底地形测量、障碍物探测、水文要素调查、海洋重/磁力测量,海洋专题测量和海区资料调查;以及各种海图、海图集、海洋资料的编制和出版,海洋地理信息的分析、处理及应用。
# `3 d- ]& I5 _ 
# w1 f. J1 p& ]
1.3 海洋测绘特点: 7 @( b h5 e! h5 U, h8 a' P
(1) 陆地上所测定点的三维坐标是分别用不同的方法,不同的仪器设备分别测定的,但在海洋测量中垂直坐标是和船体的平面位置同步测定的。
" |) \( A. e. o2 O% w (2) 陆上的测站点与在海上的测站点相比,可以说是固定不动的。但海上的测站点是在不断的运动过程中的。
, P/ a1 `. p* y# K4 J) p (3) 在陆地测量中一般必须使用电磁波信号,而在海水中,则采用声波信号。
( t4 Y0 C8 ^$ Q4 E (4) 陆地上测定的是高程,即某点高出大地水准面多少,而在海上测定的是海底某点的深度即其低于大地水准面或水深基准面多少。
- F3 l3 j1 n$ p. h% |& c (5) 在陆地的观测点往往通过多次重复测量,得到一组观测值,经平差后可得该组观测值的最或是值。但在海上,测量工作必须在不断运动着的海面上进行。
1 C3 Q! t3 f/ S (6) 陆地地形测量及工程制图大多采用高斯-克吕格投影,而海洋制图还有墨卡托、UTM投影等,尤其海图投影基本采用墨卡托投影。
1 O' q: P( [5 Z2 T- T3 l$ w5 V 
' m( ?$ U7 [* D9 P
海洋测量的任务既可以是科学任务,如研究地球的形状、研究海底地质构造的运动、海洋环境等,也可以是一些实用任务,如自然资源的勘探与海洋工程、航运救捞与航道、近岸工程、渔业捕捞划界等等,具体涉及到的内容包括海洋重力测量、海洋磁力测量、海水面的测定、大地控制与海底控制、定位、测深、海底地形勘测、制图与MGIS等等。 ) i9 |; G. p" `3 d
1 M- v' O' w# q g* c l 1.4 海底地形测绘涉及到常用的规范主要有:《海道测量规范》、《海洋工程地形测量规范》、《水运工程测量规范》、《中国海图图式》、《三四等水准测量规范》、《全球定位系统GPS测量规范》... 9 s3 K5 t* i4 w6 x; b1 g- u
1.5 水深测量经历的发展阶段:测绳重锤测量(点测量)——>单频单波束测深(点测量)——>双频单波束测深(点测量)——>多波束测深(面测量)——>机载激光、遥感测深(面测量)。
& w/ l& X2 _8 x) c5 G6 [3 Q) _ 
& H; \/ l* j1 a- N
6 c! x( n' g/ p# E) R
二、水深测量实施过程
7 l& m0 \( g8 n; U- A 2.1 技术设计(实施计划) 4 g. T; X' G3 V" i
(1) 概述:简述任务要求、依据的标准、测图比例尺, 水文气象、仪器、车船配置等。
r2 v c% I# x8 @; m (2) 控制测量:采用的坐标、高程系统、投影带和投影面、坐标及高程系相互转换及对拟利用的原有资料检验的方法(平面、高程、施工控制布网方案、平差方法;造标类型、高度、埋石规格、需用材料的估算及点之记要求;水位站配布的密度、数量、站址、有效控制范围、水位改正区域的划分;平均海面、深度基准面、绘图水位的计算;水位控制的实施方案)。
3 Q6 {2 ?# b1 \+ l0 k5 \ (3) 水深测量:测深线布设方案、测线长度、定位点间距及深度插点原则;深度改正求取方法;导航定位方式;测深设备; Q* o5 s* W8 P5 o# V2 g$ Y
内业整理及绘图方案要求。
+ S, @; h: {! a/ y ^ (4) 实施方案:技术人员选定及分工、仪器设备、控制测量实施、 水深测量实施、内业数据处理与绘图、时间进度、质量、安全保证大纲等。 . v Y- E& C5 v& c! \
2.2、准备工作
, f) `0 J8 j+ r, n8 I* k* Z7 E* _ (1) 准备工作:合适的测量船只、水位观测位置;水位计安装与零点测定;坐标转换参数测定,GPS比测;设备安装(GPS、测深仪、导航计算机等)。 : Z# E3 V# C F. [0 r' V
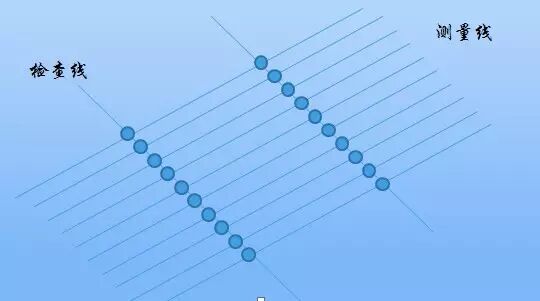
(2) 测线布设:测深线分为主测深线和检查线两大类。主测线间隔一般为图上1cm,检查线间隔为主测线的10倍。主测线一般垂直于等深线或岸线,以能准确显示海底地形地貌为原则。多波束测线则是考虑经济、安全等因素。 & S/ x7 M3 s3 v3 C# }; Z
(3) 控制测量:针对水位站布设进行高程测量,确定验潮仪水位零点。验潮站布设及水位观测相邻验潮站之间的距离应满足最大潮高差小于1m,最大潮时差小于2h。主要水准点、工作水准点。验潮站附近的高程控制网中的点(一般不低于三等)可作为主要水准点。工作水准点设在验潮站附近,采用四等水准联测。水尺零点可采用等外水准联测。
r6 r/ k1 f' @/ F) y# {$ T (4) 自动验潮仪:设立校核水尺。皮尺吊放方式等。 ! h3 g# ^! h: O
(5) 水位观测:<10分钟 3 d% l% {# u4 n( ?
2.3、水深测量 N$ F" |0 v6 S! W# l$ l2 C4 e
GPS天线直接安装在测深仪换能器上方,稳定性试验,吃水量测与声靶比测; 8 Y) h$ g. b1 q* d, S* o
(1) 起伏改正:姿态补偿; + n3 G# | f2 W0 `8 T3 w2 N
(2) 测量:沿测线匀速航行;测后吃水测量; + N9 A, a. v: w3 U7 `2 M
(3) 水深测量误差源主要有:声信号传播路径(包括声速剖面)有关的声速误差;测深与定位仪器自身的系统误差;潮汐测量和模型误差;船只姿态引起的误差;船只运动传感器的精度引起的误差,如纵横摇的精度、动态吃水误差;数据处理误差等等。
" ?8 _" r) L$ b) D M& |4 S 2.4、数据处理
# K( {" x% Z; \6 P0 e0 g (1) 测深数据处理用到的软件有:HiMAX、HYPACK、QINSy等;外业数据检查(测深、潮位); " c2 K, K5 i2 {9 A+ y8 f- d
(2) 数据处理:定位数据(跳点);测深数据检查;吃水改正;水位改正等;图件绘制;海图图式、地形图图式、工程图式、航迹图;
* ]( L% t/ `: j' G 2.5、技术报告总结 . a. w" j# e, c j- ]3 ?
7 h( q+ b) W5 r3 Z% u5 b# K5 o) }3 O (1) 精度评估:定位精度评估 - z3 e% s' M1 i
(2) 水深精度:根据交叉点两次测量的不符值统计结果来评价系统水下地形测量的精度。 ; Z& F5 o7 H/ b+ ?! T" m! R
/ [! j0 H- M8 Q/ W d4 V* g' ]% x
(3) 水位改正:直线分带法、时差法(原则:两站之间潮波传播均匀,潮高和潮时变化与距离成比例) $ V5 C, j) N4 O( l- v# o, t! ]3 Z& x
(4) 分带的基本原则:分带的界线方向与潮波传播方向垂直。分带数(δz为测深精度;△ζ为两站同时刻最大水位差):
, j% L! _; }' A* v v' [/ \ 
' O& e4 r+ c( |. \$ }1 O; v+ ` 
( ~# i+ A6 V7 H8 P! }1 C
三、海洋测量技术 # O+ B+ l; n+ C5 R3 c8 \
3.1 定位技术
4 \( l& p2 U4 E( T* J* ^ (1) 水面定位:天文定位→光学定位→陆基无线电定位(传统意义的无线电定位)以及工程上的微波定位→空基无线电定位(卫星定位) % E F% K; F' E1 D. P2 A
(2) 水下定位:超短基线定位、短基线定位、长基线定位、组合定位 + f' p9 ^% i9 }/ v! N& s& q) C, c
超短基线的所有声单元(≥3)集中安装在一个收发器中,组成声基阵,声单元之间的相互位置精确测定,组成声基阵坐标系。系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度);换能器与目标的距离通过测定声波传播的时间。系统的工作方式是距离和角度测量。
( g7 m6 [. }% } 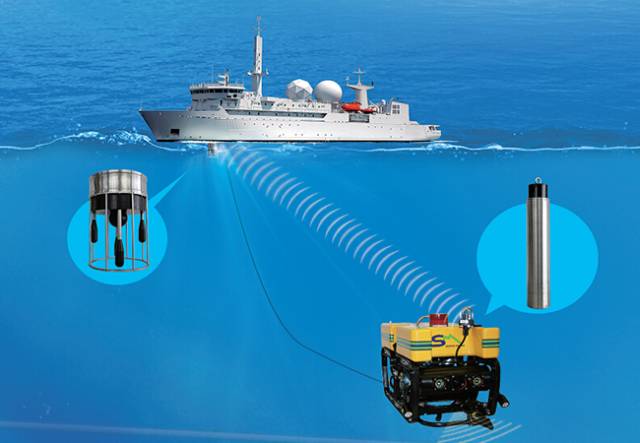
# A, [! v) v2 _9 Y
长基线系统包含两部分,一部分是安装在船只上的收发器(transducer)或水下机器人,另一个部分是一系列已知位置的固定在海底上的应答器,至少三个以上。应答器之间的距离构成基线,长度在上百米到几公里之间,相对超短基线、短基线,称为长基线系统。长基线系统是通过测量收发器和应答器之间的距离,采用测量中的前方或后方交会对目标定位。系统的工作方式是距离测量。 ! J# P$ f& x. K
(3) 船舶动力定位:GPS、电罗经、姿态传感器、水下定位系统与船只动力的控制实现。 ' S4 C/ ^+ n0 q' s2 Y/ B9 C+ z
3.2 测深技术
9 u. }. v) f' N( X 测绳(打水铊)→单波束测深仪/多探头测深仪→多波束测深系统→机载激光测深系统/卫星遥感测深等。 4 O9 Y6 E+ W8 i4 ?( P( O3 T+ w
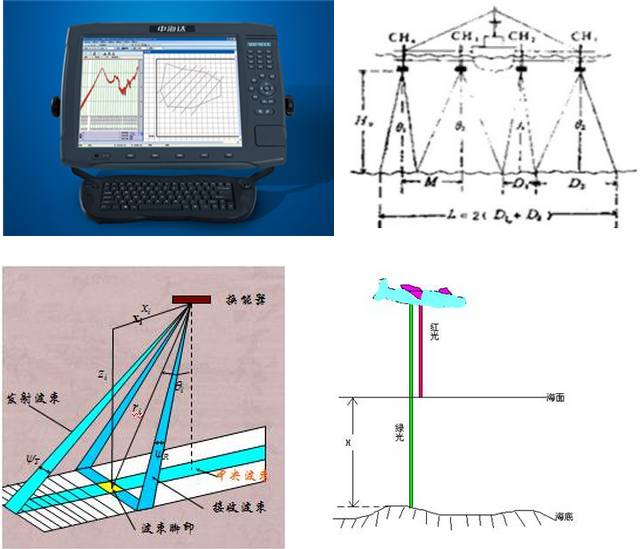
单波束测深仪(Single Beam Echosounder)—19世纪20年代出现的回声测深仪,水声换能器垂直向水下发射声波并接收水底回波,根据其回波时间来确定被测点的水深。测量船在水上航行时,船上的测深仪可测得一条连续的水深线(即地形断面),通过水深的变化,可以了解水下地形的情况。属于“点”状测量。
+ H2 L# @) A2 q, W3 z2 f2 R& y 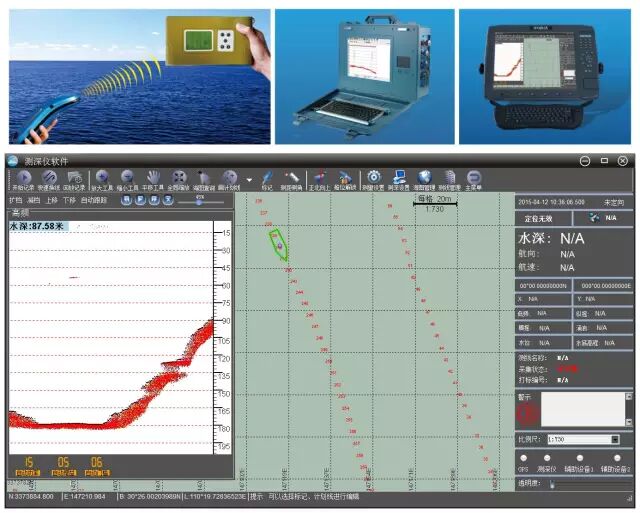
' i% p V3 {- X5 w; S6 t
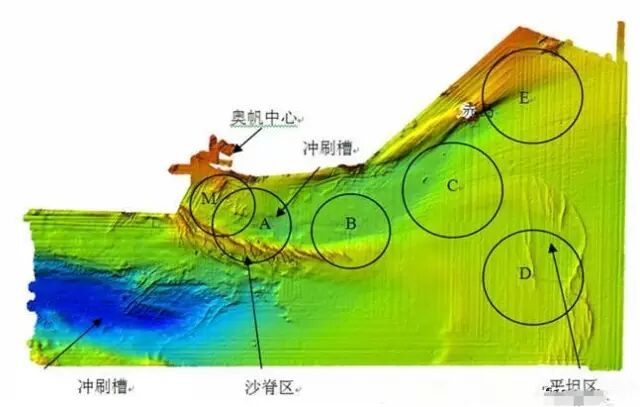
多波束测深仪(MultiBeam Echosounder)—20世纪70年代出现的条带式测深系统,它能一次给出与航线相垂直的平面内几十个甚至上百个测深点的水深值,或者一条一定宽度的全覆盖的水深条带。精确地、快速地测出沿航线一定宽度内,水下目标的大小、形状和高低变化,属于“面”测量。
% R+ ~- `( d) j 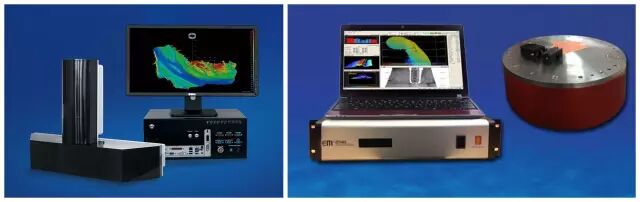
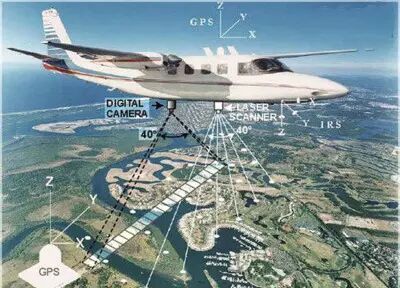
5 u" J: t, s% T6 H* s2 N4 S* z; i 激光测深(Airborne LIDAR-Light Detection And Ranging)—20世纪70年代发展,90年代逐渐成熟的最新测深技术。通过发射两束不同波长的激光脉冲射向水面,红光在水面被直射反射回,而蓝绿光在穿透水底后被海底反射回,这两个光束的接收时间差即为水的深度。
& m5 D( L8 c$ t5 e4 u 四、未来海洋测绘发展展望 * S. e5 W# X/ }: |7 g
基于计算机技术、信息获取及处理技术、电子技术、自动控制技术等,海洋测绘学科已经发生了深刻的变化。 ! Y0 Y9 m8 c% b0 o4 J9 ]& l
机载激光测深、多波束测深、侧扫声纳系统的成熟,实现由点测量到面测量。
2 j( @6 p0 b4 @: e2 ` 信息获取由传统的测量船平台发展到飞机、卫星、机器人测量平台。
6 G; t* c- f( i! o; y: G& { |3 W 数字测量时代到来,由传统到以4S技术(GPS、GIS、RS、ES)为代表的现代海洋测量新阶段。 - o, R/ m h4 E# U
海图制图以数据库应用和计算机制图为代表,进入了海洋测绘网络化服务、信息化保障、多方位应用的新阶段。电子海图正在逐步取代传统的纸质海图。 ( F- j+ Z( N+ t
海洋经济发展测绘保障工程:实现海洋地理信息资源标准化与规范化,加强海洋导航定位服务,促进海洋地理信息的集成管理与应用。
0 H; V! L* t; c) Q 
3 t7 X, G+ J% l/ n4 r$ \
(1) 服务对象向全方位、多层次转化
0 @ ~# G' j" _3 b0 |4 J 以船载多波束、机载激光为代表,海底地形测量以全新的面貌展现。无缝垂直基准的实现。 ( t3 ?- ?) i2 v0 x( l, Z
测量成果以更多形式向社会提供服务。如数字海图、电子海图、测绘数据库等形式。尤其MGIS将会以更方便、更全面的方式为多学科、多种实用目的提供服务。 2 [. @+ p8 l. q. S
海洋重力直接为测绘基准、航海服务、军事应用转化。
2 O* z7 A' g: k* w' m1 P 海洋磁力为航空磁探潜磁北京场构建提供数据基础。地磁场信息应用于航海导航、探潜反潜、远程武器发射从理论探讨逐步走向试验阶段。
$ P% `5 r+ H5 [. G( s (2) 信息获取载体由船到飞机、卫星、水下机器人等,由单一系统向集成系统发展。信息获取源由单一的声学到光学、电磁波、雷达等。 " {9 r$ c0 L' `" `; X" P& B F
(3) 信息服务形式由三维静态向四维动态发展
~/ I( R g; ` 海洋的瞬时表面受风、浪、流、潮汐的作用下变化巨大,甚至海底表面经过台风、寒潮也会发生变化。以四维动态形式提供海洋测绘信息服务相对陆地更有意义。(海啸预警)
' @" o, S0 C6 p/ y# k- _# x! P 海底工作站、Argo浮标、水下滑翔机、海底固定检测设备等可以实时提供信息。
J2 T& l8 y' N$ V0 x/ W- f (4) 走向交叉与合作 & D- ?* _) s0 Y* j
海洋测量与陆地测量的有关理论和方法是相关的,根据其特点,对这些理论和方法进行创造性的运用,尤其是海洋测量所用的仪器设备与陆地测量的有明显的差别。 + B Y2 K4 h3 u
随着卫星技术的发展以及在海洋领域的广阔应用,海洋遥感学也成为目前研究的一个热门领域,与之相关的学科是航空航天学、遥感技术以及摄影测量学。 8 n9 u+ c2 p9 {; V, ^
对海洋环境的了解已成为每一个海洋测量工作者必须掌握的知识,海洋学这方面会起到显著作用。另外,海洋测量的必须对地质学要有所了解,地质学是解释海底地貌运动的基础。 : {; F+ `# G! r3 d6 U+ V
参与全球重大海洋学研究计划。“通过加强交流和协作提高科学水平”。
" F+ N9 f. M, `& G# c: ?. C; J 精品内容推荐 * w9 S; ~; O9 v
※海洋技术分类及相关设备与海洋技术发展重点领域 ; \7 F9 Q4 h) b* v2 v) F+ P) J
※不明觉厉!CASS快捷命令一览 % \/ I% b! w- ?7 o7 W" a5 G+ O
※关于GPS RTK点校正的一些Tips f' w; x2 E3 f( T
- N" p9 h& t8 D- b
1 B) x3 U: b" e& i) a& ~' ^0 L
% I) ~( R% F+ b- O5 N3 P
+ b7 Z1 n$ g' Y6 W' x& z7 G0 X8 B | 

