|
0 e" @1 i" q: f4 N 地点:珠海市三角岛向外延伸200m水域 % x. y7 s! r* O6 s
时间:2019年4月
- H8 m/ N; @; o: {% C! N$ Y 使用设备:云洲M80“极行者”探测无人船,RESON T20P多波束,POS MV wavemaster组合惯导和海鹰HY1200声速剖面仪
- w+ Q# ?7 C( A% Z, ^4 @1 ~2 f 6 b% U+ w) {! |+ u
测区简介 4 a' l8 f) `: q" F, l1 G
三角岛岸线总长度约4.9km,投影面积约0.87km²,自然形态表面积约0.96km²。岛体呈东西走向,长约1.6km,宽约1km,最窄处宽约200m。测区周边海域平均水深7m,主要港湾是三角湾和北边湾,岛南近岸有干出礁和明礁。 ( @/ L: z. T" t& P) H
三角岛实景周边海域案例描述 8 k# h/ d( d% ?5 u8 Z6 {
云洲智能受国家海洋局某单位委托,采用云洲M80“极行者”探测无人船搭载多波束对三角岛沿岸水深地形进行测量。测区为三角岛岸线向外延伸200m水域。水深小于2m的极浅区不采用多波束施测,其余区域按照多波束全覆盖测量实施。
* P8 G: f$ c5 e" U7 [ 测量整个流程包括驰抵工区、理清边界、布设测线、循线航行、记录数据、返航。云洲M80“极行者”探测无人船最大航速12kn,驰抵三角岛约耗时2小时。驰抵工区后,首先进行声速剖面进行采集,使用海鹰HY1200声速剖面仪进行采集。 $ i! K1 w0 f% @9 n, F, [
根据作业要求,对2m水深以上离岸200m以内区域进行作业,需采用遥控模式对三角岛岸线水深进行摸底,获得水深2m的边界线,并通过基站软件的无人船航迹功能,对边界条件进行框选,完成理清边界工作。根据实际水深、多波束扫宽(4倍水深)及全覆盖要求(10%重复),布设平行测线及检查线。工作人员发送指令,无人船按照布设测线依次航行,测量水深数据并记录,同时保存PDS文件及XTF文件,以备后处理使用。
) a% {2 A, `1 U1 J6 R3 ^ 三角岛测量中基站软件界面实时监控测量数据分析
( Y5 r" U4 j: F R8 V% ?3 R 【三角岛西部海域】实际测量时间共约2小时,其中1小时进行2m等高线探索;剩余1小时按照布设测线进行循线航行,共布设10条500长的平行测线,有效航程约5km。
+ h3 Z: @. |! }5 }; H0 Q 【三角岛北部海域】实际测量时间共约5小时,其中1.5小时进行2m等高线探索;剩余3.5小时按照布设测线进行循线航行,共布设17条1000m长的平行测线、10条300m长的平行测线以及3条400m长的检查线,有效航程约20km。
7 q3 l( Z* b. Y( N3 b6 ? 【三角岛东部及南部海域】由于三角岛陆地地形呈三角形,因此东部及南部作为三角岛的第三条边,可视为一个整体作业区,该海域水深变化较大,作业面积较大,实际测量布设测线较多且密,有效航程约41km。 ( C& r9 y1 j' N$ t6 [
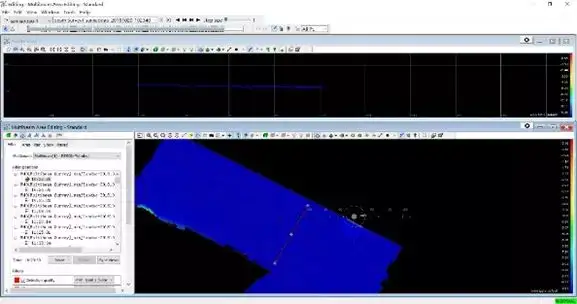
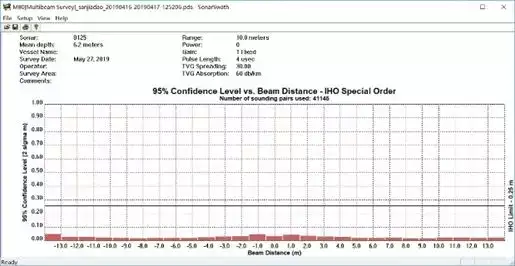
航行测线记录多波束数据通过PDS2000软件进行后处理,波束角使用135°,从测线截面图可见,波束拼接质量好,整体趋势完整,数据质量优良。选取其中一条测线进行IHO-44 95%置信区间评估,测线满足IHO-44(IHO Special Order)特优级标准。
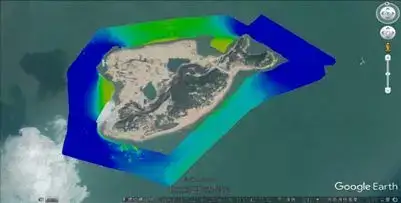
) ^7 d1 h/ G- f! B) O: v* W! V6 r 多波束数据截面拼接效果IHO-44 Special Order评估三角岛水深渲染图水深数据经后处理,并用地图打开拼接后的渲染图。三角岛西面和东面的青洲水道和赤滩门水道水深较深,平均约10m(WGS-84高程标准),三角岛北面及南面水深较浅,且南面存在大量的干出礁及暗礁。
, R7 @ v6 ~. M, T" ^( g1 \9 o7 F 应用结论
9 i/ F7 F2 } H z, q! t9 q 本项目验证了无人船进行海岛周边水深地形测量的可行性,数据质量满足IHO-44特优级标准;无人船作业循线精度高,偏航距离小,无需人员进入,保障人员的作业安全;无人船可获取岛礁周边海域极浅区水深数据,为通航及开发提供必要的数据支撑;还可通过多条、多规格无人船协同施测的方式,进一步扩展可施工海况下的有效工作量,以应对岛屿海况较差的情况,从而提高作业效率。 1 |" K h6 h$ x1 o6 ^
, k" O/ b: i" j" g u& f
& n! q: k; {2 p: u
4 I8 |9 o- `# H1 [7 F. A
8 Z3 P6 p9 \9 X' I |