|
+ ^( Z$ c2 \. T6 P& z) \! G
同陆地上一样,在海上进行开发的第一阶段工作就是测图,水下地形图测绘在测量方法上与陆地测绘地形图相差较大,进行水下地形测量时,每个测点的平面位置和高程一般是用不同的仪器和不同方法来测定,如平面位置可通过GNSS定位等方法测定,而高程是通过测深仪测出水深后,由水面高程(水位)减去水深得到,如在近海测量,测得的水深值还需加入潮汐改正、仪器换能器吃水改正等。7 \; O7 j$ P+ K( o$ `
3 X1 S! s6 n4 R( V3 g 1、水下地形测量的平面定位方法 根据离岸远近的不同主要有全站仪定位法和GNSS定位法等。在港口及近岸水下地形测量常常采用全站仪定位法,即在岸上假设全站仪,采用极坐标测量实时进行定位,观测值通过无线传输等方式实时传送到船上的便携机中,与对应的测深数据合并在一起。在实际应用中越来越多的采用GNSS查分定位法,即GNSS接收机与测深仪组合,GNSS接收机用来进行定位,测深仪同时进行水深测量。
$ e+ Z2 M) d$ v/ | 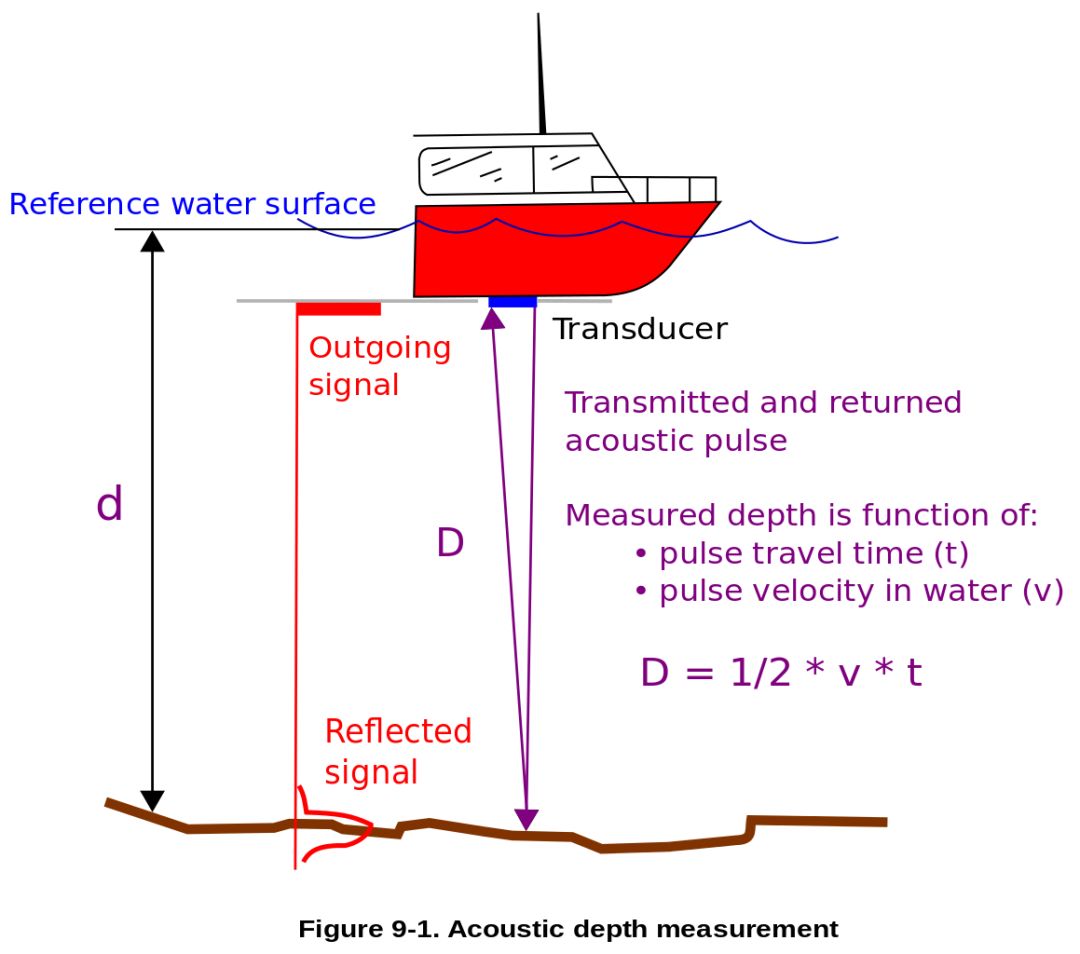
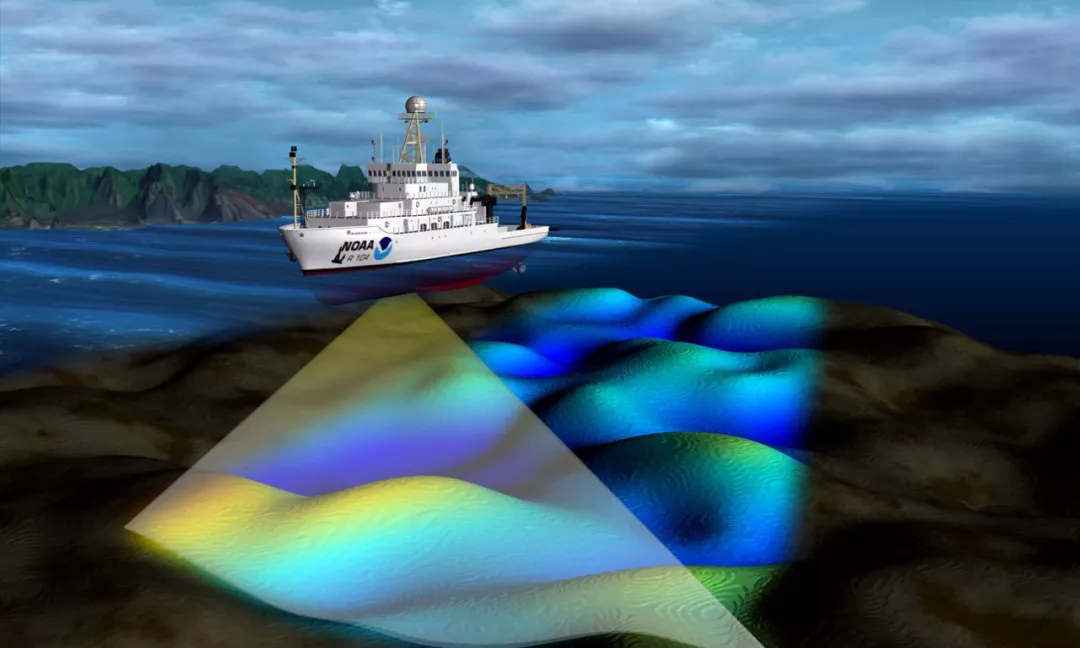
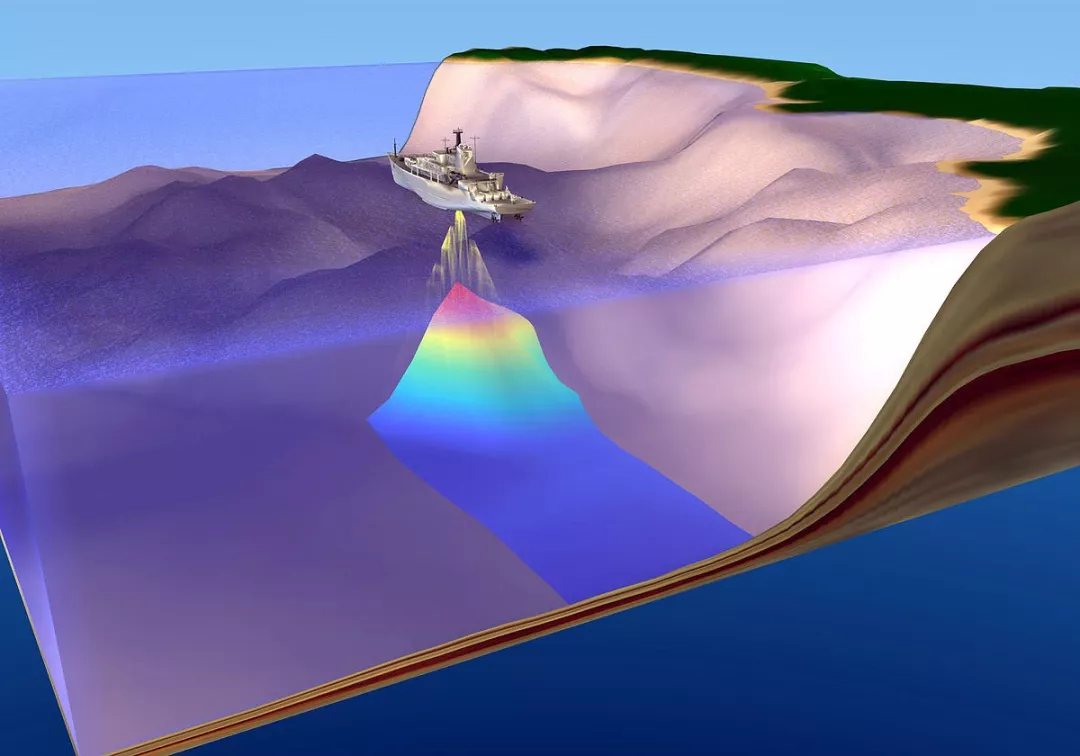
2、水深测量水深测量的仪器主要有测深杆、测深绳、回深测深仪、多波束测深仪以及机载激光测深仪等。测深杆适用于水深小于5m且流速不大的浅水区,测深绳适用于水深小于20m,且流速小、船速小、底质较硬的水域。回声测深仪的基本原理是测量声波由水面至水底往返的时间间隔,从而推算水深。回声测深仪只能沿测线测量水深值,而多波束测深仪是一种能够一次给出与航向垂直的剖面内几十个甚至上百个水下测点水深值的测量仪器,与传统单波束测深仪比较,它具有测量范围大、速度快、精度高、自动化程度高等优点。& @$ S4 U- ]) y5 J( {$ H `2 l
3、水位与深度基准面水位指水面相对于某一高程基准面的高程。水深计算的起算面称为深度基准面。我国从1956年开始采用理论深度基准面作为深度基准面,理论深度基准面是理论上可能出现的最低潮面,在内河及湖泊采用最低水位、平均低水位或设计水位等作为深度基准面。' v5 K/ Z6 F/ o' e3 U) t* F1 v0 ?
4、测绘工作实施在现场实施外业之前,需根据测区内水面的宽窄、水流缓急等情况在图上设计一定数量的断面线和测深点,测深断面线的方向一般与河流主流或岸线垂直,在河道转弯处,可布设成扇形。测深断面线一般规定在图上每隔1-2cm布设一条,测深点间距一般在图上为0.6-0.8cm。
$ m% S; n2 \, l' | ? 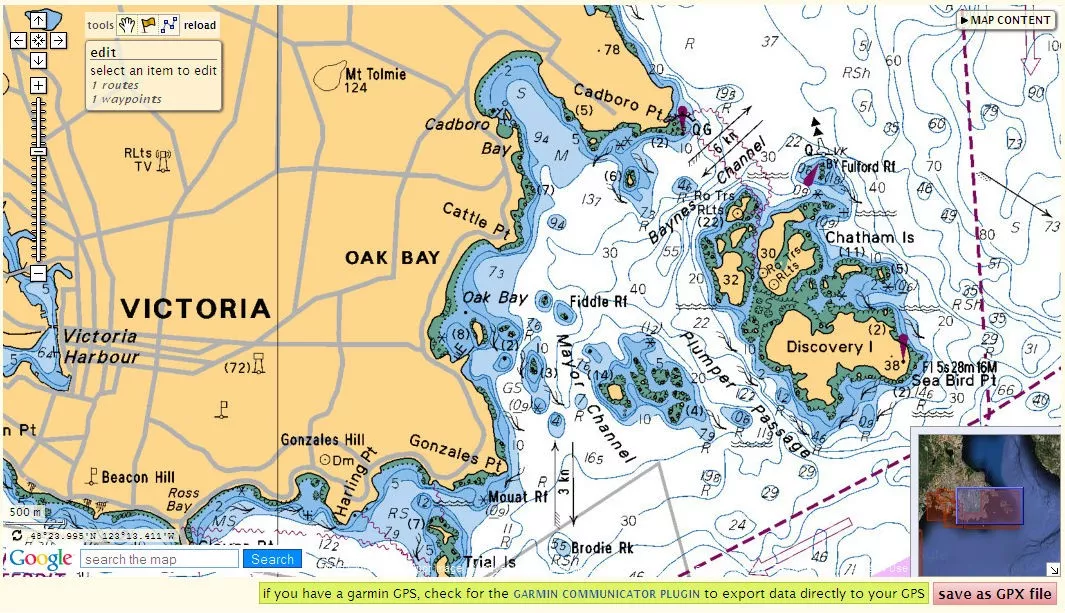
4 I% Y; W" M R9 i R9 x1 F
外业工作结束后,内业工作主要包括:(1)整理、汇总平面和测深观测数据;(2)由水位观测结果和水深记录计算各测点高程;(3)展绘各测点位置,注记相应高程;(4)绘制等高线或等深线。 ( o$ h8 q6 _" n7 ]0 Y! o! o7 g

CGCS2000坐标系及与54、80、WGS84、北斗坐标系的区别地铁CPIII轨道控制网测量《2023年测绘地理信息自主创新产品目录》发布地铁第三方监测2023地理信息产业百强企业名单三维激光扫描技术在土石方测量中的应用地铁建设各阶段的测量工作EGM 2008全球重力场模型测绘期刊论文投稿网址邮箱大全隧道两井定向联系测量3D扫描建模:模型如何摆正RTK测量简述制作点云漫游视频,就用NUBIGON
, V- s; \/ Z( I" g 三维扫描点云拼接常用方法
; A: ?; U6 o9 e, F 科普:对边测量和悬高测量 6 Y' t7 I9 a7 K. o
徕卡全站仪自动瞄准棱镜,十字丝为什么不在棱镜中心?
9 j8 k1 F2 m2 Z( J$ Q 高速铁路轨道控制网测量
6 k0 \8 O U, ^3 P. C! Y+ H 高斯投影及投影分带 0 P# V! Z+ n/ w/ b% Z% e0 A% O
精密导线边长改正 高程归化 投影改化 + p* y% Q/ H7 S
全站仪棱镜常数测定方法
" _- e: n# t8 z6 J. ~& W 地图的分幅与编号
2 Z' k* g' ?1 e( T8 s/ S S% H/ ?) B 基于机载点云的DEM生产数据处理流程
4 u! H1 G3 ^/ ]7 p& \- u; B/ ?
9 m B% O7 W% X, b3 x _, @
8 q3 [$ Z4 v6 e) W( e7 D, a6 h3 F: ]* q3 c5 R8 H4 h/ u
# i1 ~$ @2 Q; q( Z g | 

