% E, n) B" X; z. Z/ Z3 n
偏振激光雷达探测大气—水体光学参数廓线2 Z" r/ Q! n/ {1 M% [4 o7 C
8.1引用方式- r" d3 ~( n% J. B0 _; _; _
周雨迪, 刘东, 徐沛拓, et al. 偏振激光雷达探测大气—水体光学参数廓线[J]. 遥感学报, 2019, 23(01):112-119. 8 l! P( m, ^ W
8.2主要思想" Q5 r' s$ A9 m$ L' ?1 O$ j) z
激光雷达在上层水体垂直廓线的遥感中展现出巨大优势。本文研制了一套高垂直分辨率的实时探测偏振激光雷达,提出了一种基于偏振激光雷达回波信号的反演算法,采用Fernald理论和多次散射原理反演非均匀大气—水体的衰减和退偏光学产品,以高效稳定地处理偏振激光雷达实验数据。展示了一个中国内陆水体激光雷达探测实例,观测到了两次气溶胶积聚现象和一次水体浑浊现象。对实验数据的分析表明,退偏比主要由前向多次散射和后向单次散射产生的退偏两部分组成。当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。 / R$ F# J& S2 y( J2 h( A
8.3主要内容原位测量通过散射计、衰减计等设备直接接触并测量水体,是目前最主要的水体探测手段之一。这种方式具有较高的精度,但探测效率相对较低(Balino 等,2001)。被动遥感技术,如宽视场海洋观测传感器(SeaWiFS)等,能够提供全球尺度上的水色观 测,却受限于探测深度和光照条件(Mao 等, 2010)。声学探测在水体中广泛使用,如声呐等,可以主动探测水体廓线信息,但水气界面的高反射率使其无法工作于飞机和卫星平台。激光雷达是一种主动光学遥感设备,能够穿透水气界面, 获取上层水体垂直廓线信息,具有高时空分辨率、全天时、全天候的工作优势,在上层水体遥 感中展现出巨大的优势(Vasilkov 等,2001)。如今,激光雷达已成功应用于水深测量、水 下目标成像、激光诱导荧光、海面粗糙度测量等领域,并在水温廓线探测中展现了巨大潜力(Shi 等,2008)。除此之外,激光雷达可以提供水体悬 浮物垂直分布的信息,特别适合于鱼群、浮游植 物层和海洋内波等水体分层现象的研究(Vasilkov 等,2001)。 y: u2 W7 W' m1 E! g% Q7 ~
* m$ ]: V# `; F! v- F0 _6 |
, ^; O2 ]; k3 u3 O0 z" j3 H
6 [1 z1 G, Z/ C( Y5 ?# I
" L) k2 S; s& Y
8.4结论及改进方向
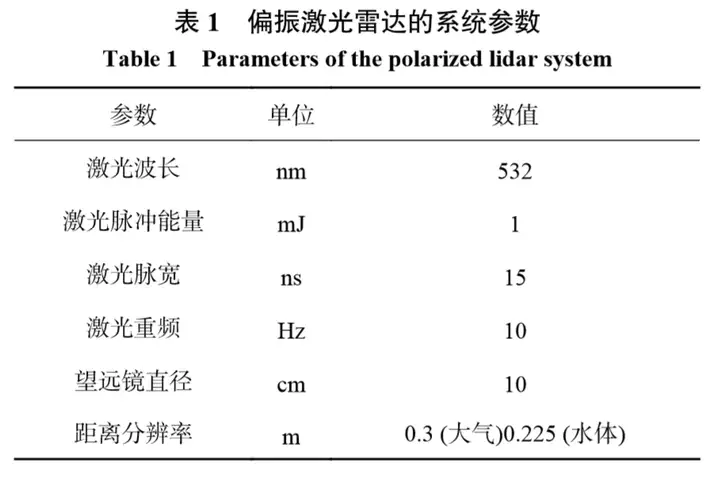
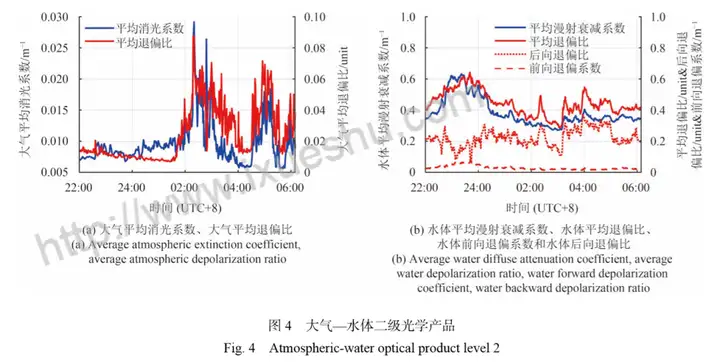
7 C9 F8 l$ z3 f2 i8 h* H 本文描述了一套研制的高垂直分辨率的实时 探测偏振激光雷达系统,并基于该系统展示了一个激光雷达反演算法,可获得大气的消光系数和 水体的漫射衰减系数,且能获得两者的退偏特性,包括退偏比、前向退偏系数、后向退偏比等。激光雷达探测了浙江省峡口水库的大气和水 体变化情况,实验观测到了两次气溶胶的积聚现象和一次水体浑浊现象,反演产品在大气和水体 中的距离分辨率分别为0.3 m和0.225 m。实验结果表明,偏振激光雷达能够快速实时探测大气—水 体光学特性的垂直分布特征。
}+ p3 \( i/ D" e0 L+ S* @ 对实验数据的分析证明,退偏比主要由前向多次散射和后向单次散射产生的退偏两部分组成。对于散射体性质较为稳定的水库水体,假设单次散射比近似为常数,平均漫射衰减系数能够反映多次散射的强度。当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。 2 h) Y$ V# Z. b, Q
本文通过研制的偏振激光雷达获取了水体的光学参数,然而Fernald方法的应用中必须假设激光雷达比,限制了传统激光雷达的应用,未来将发展高光谱分辨率激光雷达(Zhou 等,2017),减小假设激光雷达比带来的误差。通过对实验数据的分析,本文认为漫射衰减系数可以代表前向多次散射退偏的强度,然而目前还没有成熟的方法可以从前向退偏中去除多次散射成分,得到固有的前向单次退偏特性,未来希望发展新体制的激 光雷达定量评估退偏比中的多次散射成分。 2 O+ F/ r4 X& W6 f! n% o
蓝绿光星载海洋激光雷达全球探测深度估算; p* P/ T7 B7 t n6 B2 Q- ]6 t
9.1引用方式
4 j c# ~! W( f G+ x 刘秉义, 李瑞琦, 杨倩, et al. 蓝绿光星载海洋激光雷达全球探测深度估算[J]. 红外与激光工程, 2019, 48(01):128-133. % S* ~. B* H$ D6 Y4 z1 [
9.2主要思想) [6 b* Q* Q$ n) [0 q7 D% ^7 ]
为了评估和分析激光雷达探测全球海洋光学参数的性能,根据激光雷达方程和给定的激光雷达参数,使用 MODIS Level 3 全球年平均的海水吸收系数 a( λ )和后向散射系数 bb( λ )数据作为海水光学 参数的参考值,对蓝绿光星载海洋激光雷达在全球海洋的探测深度进行了估算和分析。研究结果表明:星载海洋激光雷达探测深度的分布主要依赖于探测波长和水体光学性质,清洁大洋水的最优探测 波长在 460 nm 左右,白天和夜间的最大探测深度分别为~110 m 和~120 m;沿岸浑浊水的最优探测波 长多在 500nm 以上,最大探测深度只能达到 20 m 或更浅。探测波长为 470~480 nm 时,星载海洋激光 雷达在全球范围内的平均探测能力最佳。
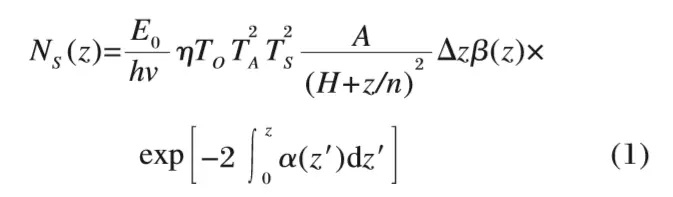
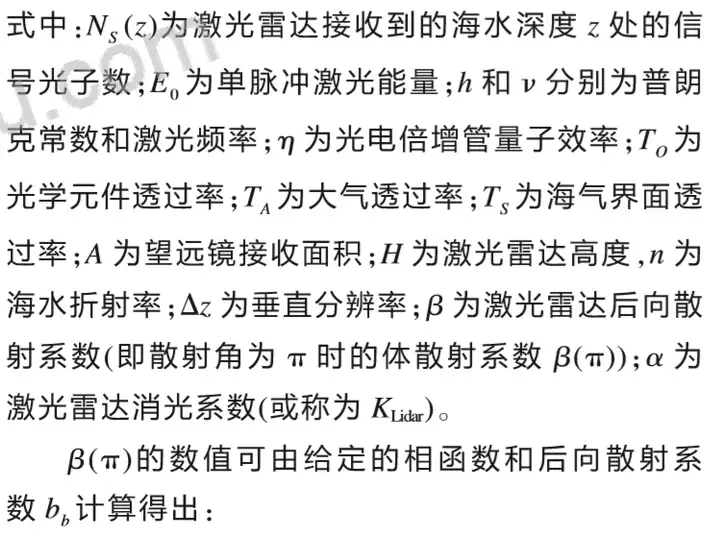
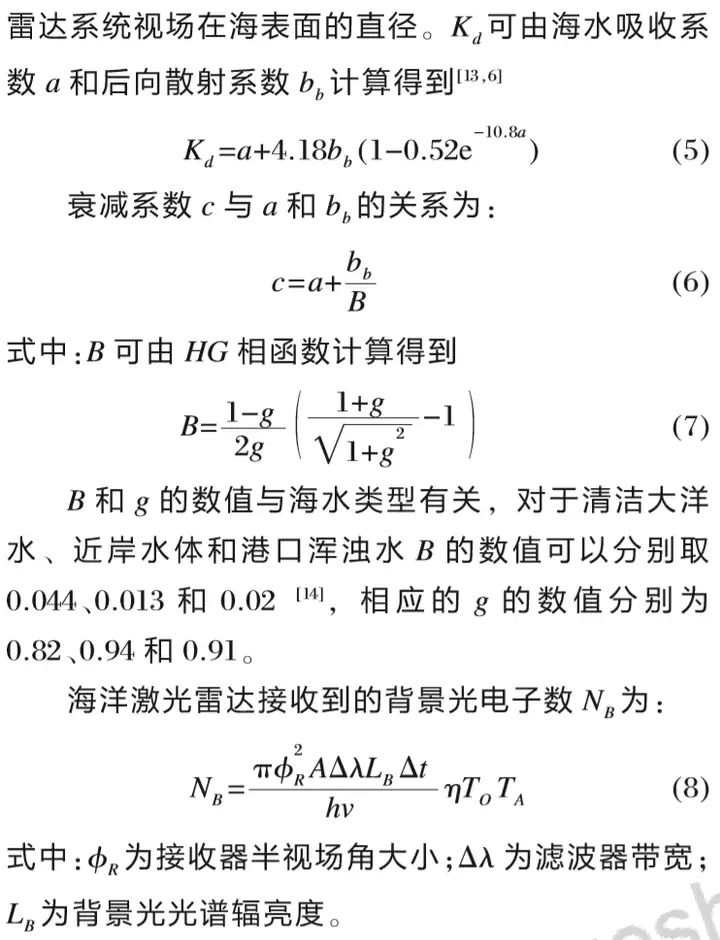
8 `& c" u" L! p* a$ c' T 9.3主要内容海洋水色遥感是实现全球海洋水体光学参数和 颗粒物空间观测的主要手段,自 1978 年第一台水色 传感器 (Coastal Zone Color Scanner, CZCS) 成功运行至今,卫星水色遥感作为全球观测系统的一个重 要组成部分,在海洋初级生产力、海洋碳循环和海洋 生态环境等领域发挥了重要作用。激光雷达通过发射激光脉冲并接收经水体散射的光信号来获取海水光学参数的垂直剖面信息。星载海洋激光雷达发射的激光脉冲经过大气、云层、气溶胶层和海面的衰减后进入海水,海水中的水分子和各种组分会对入水激光产生吸收和散射,其中部分后向散射光信号再次经过海面和大气后被激光雷达接收。由于不同深度水体的散射信号返回到激光雷达时的光程不同,激光雷达可以通过信号的返回时间获取水体光学参数的垂直分布信息。根据激光雷达方程,星载海洋激光雷达接收到的距离分辨的回波信号光电子数可以表示为:
' R5 s% i l: i $ f( E7 z: c$ Y% o0 P# I
: A# t/ c. `3 A
+ W# V; b7 j1 g, _ . L% N* D' k$ P7 K- `/ s$ `" h0 q7 a* Y
& E* v+ j1 g3 e& }- K& `! H 、 . N6 y3 D* v% s+ }: Z% k% ~
. G: R) L4 T4 Y% }2 g
/ M1 K+ a) X9 ~2 R$ [
" q- D5 G1 w- `# Z5 h1 K4 y ; J0 m8 x* A3 b# M* l* ]" A
- n7 W& v& w& w! c
/ x* M0 d. y0 V& B 9.4结论及改进方向
- q5 I- e& r; k: L 文中通过计算激光雷达回波信号和激光雷达探测信噪比,估算了蓝绿波段星载海洋激光雷达探测 全球海洋的探测深度和最优探测波长的分布。结果表明探测深度的分布主要依赖于激光波长和水体光学性质,在清洁大洋水,最优探测波长在460 nm左右,白天和夜间的最大探测深度分别为110 m 和 120 m 左右; 沿岸浑浊水的最优探测波长多在500 nm以上,部分水体较浑浊的海区的最优波长能够达到550 nm以上,最大探测深度只能达到20 m 或更浅,而且夜间探测深度和白天几乎相同;其他海区的探 测深度和最优波长介于清洁大洋水和沿岸浑浊水之 间。总体上看,探测波长为470~480 nm 时,星载海洋 激光雷达在全球范围内的探测能力最佳, 波长在 500 nm 以上时,在沿岸海域的探测能力最佳。 * V- J2 }/ c$ ]3 R9 D
选择和确定星载海洋激光雷达系统指标时还需 要考虑实际的技术成熟度和工程实现难易度, 考虑 到目前的激光器技术条件,532 nm 的激光器具有最 高的成熟度和稳定性, 该波长在近岸海区具有较好 的探测能力。 随着激光技术的发展,将来可以根据观 测范围的具体需求, 有针对性地选取特定波长的激 光光源,以提高星载海洋激光雷达的综合探测能力。
8 n- V5 t0 X* x9 q1 i4 P" P2 e- |$ V. U/ M. S- {' C' k, C
& s4 N. R/ U1 A# }' _
0 Y4 F& v+ R( X9 F6 h) A0 H0 \' t7 G3 [$ q( [# X7 ]
|