|
. i4 p7 \: L6 m" n
近日,一如下图所示的奇特鱼种在游曳于珊瑚礁时被发现,它通体白色,游动姿势和速率与普通鱼类无异,不过此前并无关于它的观测记录。
3 d f9 p) c; b' B6 Q/ D 好了,关子就卖到这里,原来这是麻省理工学院计算机科学与人工智能实验室(CSAIL)打造的一台名叫Soft Robotic Fish,简称SoFi的鱼形机器人。关于它的研究报告也发表在了《科学机器人》上,其中指出Sofi新颖的设计巧妙地解决了困扰海洋机器人界的几大难题。
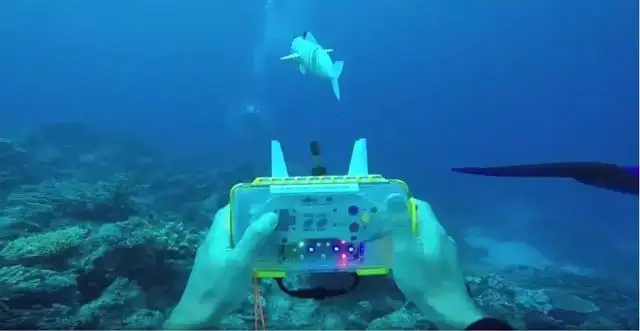
& N0 V- P: E+ V+ N3 @, J* I; F 第一,通讯。由于无线电波在水中不易传导,水下机器人通常要与船只紧密联结才能被控制。据Sofi项目的领头人,CSAIL的机器人专家Robert Katzschmann称:“射频通信在水下只能覆盖几厘米的范围,而声信号可以在降低能耗的同时传播得更远。”利用声信号,潜水员就可以在大约21米外遥控Sofi。
6 K: c( n# S! b- f$ \5 [$ x; S0 I
! u. r X9 L6 W% d$ j2 _ 图 | 在水下远程遥控Sofi
! g9 q% }' u" Z* p8 J6 ] 第二,传统的安装于机器人上的制动马达比较笨重,而且产生的动力并不稳定。而Sofi隶属于近年来新兴的机器人品种——软体机器人。软体机器人的特点一是软,二就是利用空气或油来行进。Sofi的尾巴内有两个独立的中空空间,据Katzschmann描述,“Sofi内置的泵可以让水在这两个空间内不停循环,这样它的尾巴就可以摆动和弯曲了。”这也是Sofi在游动姿态上与普通鱼类无异的原因。 ) l7 t* R) X7 M: r/ x7 W
第三,机器人要像鱼一样游动是很消耗能量的。通常鱼类需要在水中不停移动并调整自己的位置,以保持固定的深度,因此它们进化出了专门储藏气体、增加浮力的鳔。而Sofi也将这一点纳入到了自己体内:它内置一个能由活塞实现增压减压的圆柱形“鳔状物”。而且与通常有大量注满空气的空间的传统机器人不同,Sofi内部装有电子器件的“隔间”都注入了油,这也在赋予它更高的结构完整性的同时,更好地控制了它的内部压强,因此Sofi能轻易地下潜约18米的距离。 2 f# M) K5 |/ k0 {0 m! U) S8 B. g
Sofi与普通鱼类高度相似的外形和功能,在未来会给鱼类学家带来很大便利。通常当他们尝试接近鱼类时,鱼群会因担惊受怕而快速散开,而当Sofi入水测试时,科研团队发现它周围的鱼似乎都将它当作了同类,有些甚至因好奇而主动接近它。 . Z8 e% W2 Y. M! s1 R" g
/ c, X$ `$ [5 b7 H; |4 C' Y% c
图 | Sofi在水下的视角
' u+ D# G" T% E' I3 V% m" W3 b7 ?& G0 f 此外,Sofi可以被远程遥控的特点也能供科学家利用。它的研发团队表示他们正在尝试将计算机视觉技术引用到Sofi身上,这样它就能“跟踪”指定的鱼或鱼群。对于海洋科学家来说,他们由此就可以更轻松地研究鱼类集群运动,以及监测目前日益严峻的海洋环境下鱼群的健康问题。 1 g* I4 r9 C0 o2 n/ C' T8 }0 q
* x% `9 {; {, K( L
, }- W! m) K3 |6 z$ T+ t" X4 @" j: S
. G8 @. y/ Z: } |