|
8 Q4 w# P% E; ?+ I6 f' k) O5 t3 ~

1 R! o$ t9 \) M+ Y! m
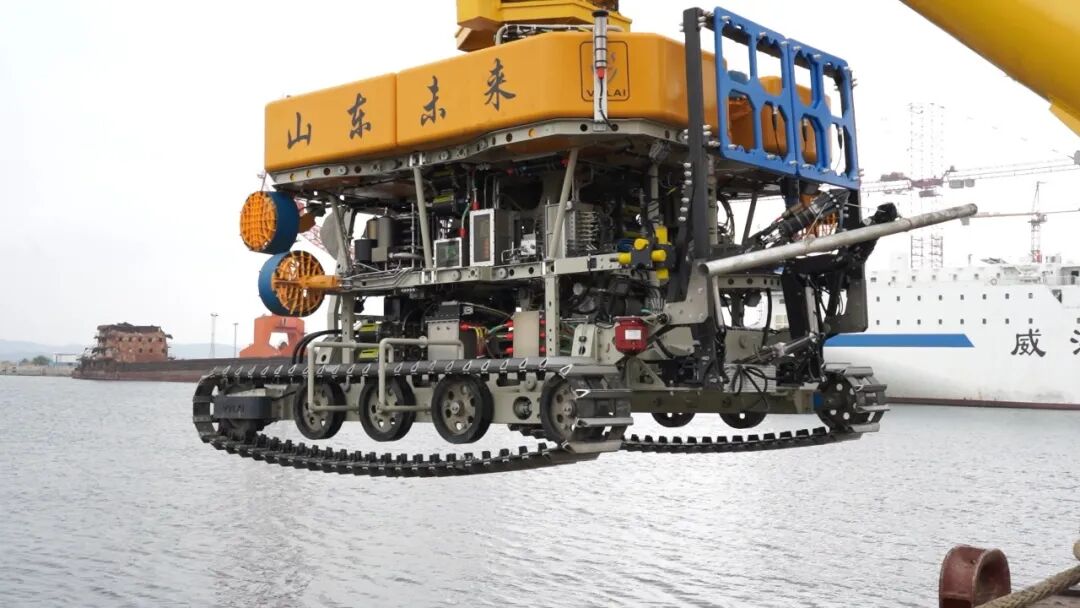
6月7日,我国第一台自主研制的1500米深海铺缆机器人在威海成功入海测试,即将交付国外客户。全套设备上千种零部件全部实现国产化,标志着我国深海机器人研发制造产业正加速崛起。
5 C) o. b: j2 O5 d: q 在水下机器人主机、控制系统、吊车系统、缆车系统四大部分的密切配合下,重8.5吨200马力的深海铺缆机器人缓缓下潜入海。 7 d: J7 p/ o; f* U9 g) P

0 i5 M$ _) a6 r5 Z; c$ V 
0 @" N$ v: [6 r. L# t+ O, j9 d6 U
深海铺缆机器人具有国内首创的大水深智能作业能力,具备水底行走、悬浮机动、精准导航定位等技术,抗水流能力强。可在1500米深的海洋中进行人工无法完成的海底光缆、电缆、管道等铺设施工作业。
6 o4 \3 A& p/ K$ ?: G5 ]2 v! l2 w. [. E. Y 
6 k/ H6 B1 {0 S. Y; } f
山东未来机器人有限公司董事长 陶泽文
+ h2 d1 `/ o$ j$ c( B 这是国内第一台全自主生产的深海铺缆机器人
9 K: S% A1 e: I$ W; U5 B7 D 以前这类机器人都是从国外进口 ; a7 u: ?1 K5 U) n- [( n. `
现在国内这种200马力的这种铺缆机器人 # Y( `0 c3 W* R
是我们第一个完成全国产 ( v1 |6 W3 q+ f! }
核心部件都是国产 7 u) M. n, u+ q, C

- [$ S( r: k$ t) C% t" |2 { 
; x- o9 D, u0 b' e
深海铺缆机器人采用“先敷后埋”技术。一边在海底行进,一边用高压水流将泥沙冲开,随着水流的喷射,一道额定深度1.5米、宽度0.4米的深沟不断向前延伸。再通过压缆装置把线缆压在沟内,回填装置将线缆沟进行回填。 & f2 Q9 m3 a7 D- @+ J' f, L. M

6 M) {) T+ p8 b
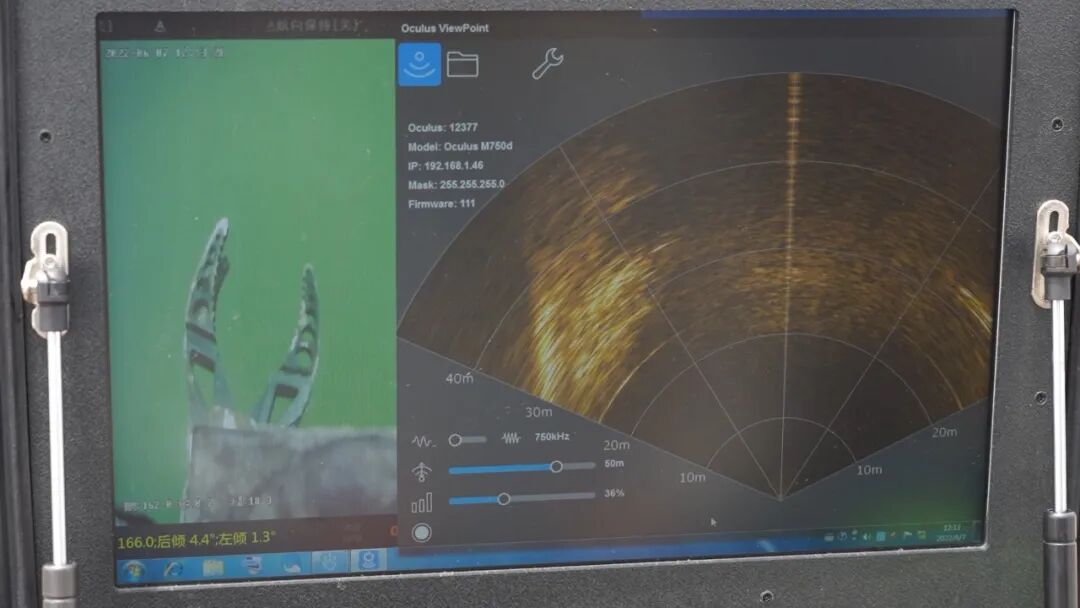
海底铺缆试验的效果如何?我们通过一个小型的机器人搭载声呐,探测一下水下作业情况。 2 g( M- s D! Z- k
2 Q- |. R* ]/ @

; C7 W* I; I! p$ p 山东未来机器人有限公司深海海工技术总监 杜阳
( D! G9 D) |$ W( X 1分半挖了20米,行进的速度是中速 4 C* b% }9 ~3 J2 q
是完全符合我们设计的要求 1 z$ g1 j7 I1 s' u: T
而且有点超出预期了,效果很理想
+ @! g! y* S. m5 z' F. W 
9 M9 H' W) U8 v$ c* L) T
在以往,深海机器人关键部件需要从国外进口,屡遭“禁运”。未来机器人团队经过17年自主技术攻关,研发资金投入1亿多元,包括铺缆机器人在内的多款产品突破了国外“卡脖子”技术难题,带动培育出上百家零部件配套企业,上千种零部件全部实现国产化。这意味着我国深海机器人研发制造产业正加速崛起。 ' W" o6 F9 t# U5 Z% _
# `( g% G. H8 m: w" I
山东未来机器人有限公司董事长 陶泽文 ; T* a" E- W0 E% L: ^, P+ V
基本上100%的国产化率
3 h+ T1 N4 d n0 I$ M6 J 核心的东西都是在我们自己手里
: E' e: `! X( Z/ g: `# m 整个的开发平台、软硬件体系都是我们自己的
6 ^: Q( w4 n4 f: q: a( e 所有配件的规格、标准都是我们自己制定
1 Z/ p2 }% x Z8 z K1 ?: s 所以我们有自己的一套体系 : f& G0 A0 i# R" `: \. D
就不受制于任何人
: {- }7 Q/ a) l O- N: n, w* t 想要三千米的也好,四千米六千米的也好 & [; B1 z3 o b- [5 w [
想要铺缆的、科考的 / Q4 y( B6 f9 r& A" r( u
各种型号的机器人都可以做
: \5 z) v. u: p+ L 我们现在跟欧美一些老外在同一起跑线上
- A* H3 W. x: T! m* r4 u7 k( R 
0 M6 P5 e$ B0 o, X/ Q- {
山东未来机器人有限公司深海海工技术总监 杜阳 6 A9 D* A, `9 U4 L# I
希望我们的技术能为国家做出更多的贡献
x! G; t4 \0 N$ r5 R. M5 B% o 能为国家提供一些力量去开拓深海,探索深海 & |9 v5 d! X5 s4 q9 N% g8 m8 [! l- E- b

高考加油
% r) _0 J; Y& G( Y: N: g3 X; p* s0 Z( v- a; q: P8 [
4 R$ v) j4 A6 q/ k% {* U
/ ^9 _0 P: J A5 E! X
, w, s6 G# h0 W/ `1 d: C | 

